我院乐松山教授作为通讯作者,指导团队博士生在空间智能方向取得系列研究进展,相关成果分别发表于国际权威期刊International Journal of Applied Earth Observation and Geoinformation(JAG)与International Journal of Geographical Information Science(IJGIS)。两项研究分别围绕自然语言驱动的智能地图设计与多智能体协同的区域地理决策支持展开,探索大语言模型与地理信息应用深度融合的新路径,是团队在地理智能平台建设、地理场景智能建模与应用方向的重要阶段性成果。
JAG与IJGIS均为地理信息科学领域的国际权威期刊,位于中国科学院文献情报中心期刊分区地球科学1区TOP,前者SCI收录,在对地观测与地理空间应用研究领域具有重要国际影响力;后者SSCI与SCI双收录,长期引领地理信息理论与方法研究的国际前沿。
成果一:MapMate—面向自然语言交互的智能地图设计框架
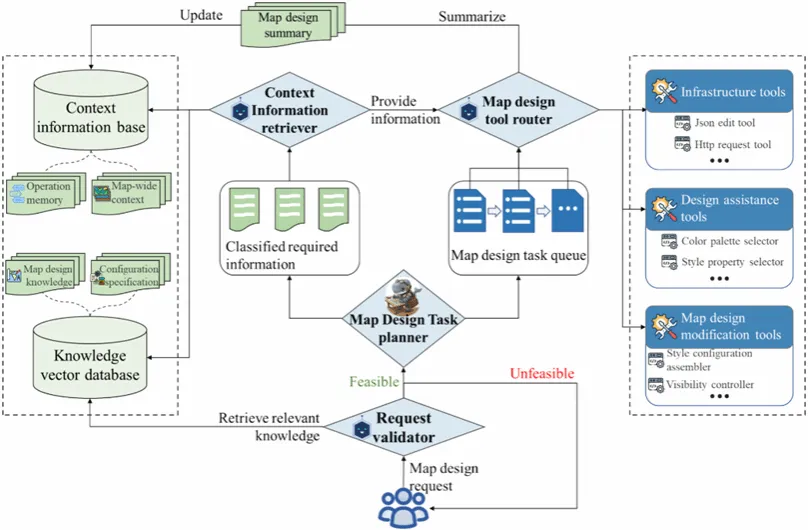
该研究提出了MapMate框架,旨在通过大语言模型(LLM)实现基于自然语言交互的地图设计。地图设计是地理信息表达与应用的基础性任务,但其涉及复杂操作流程、专业门槛较高,制约了广大普通用户的使用。MapMate通过构建层次化地图设计知识库与平台规范,弥合了自然语言修改意图与专业地图配置参数之间的鸿沟。针对多轮交互中大语言模型的记忆局限,研究设计了操作历史与全图设计状态的上下文持久化策略。通过单图层精修、跨图层协同设计及上下文感知地图多图层设计三个案例验证,MapMate有效降低了地图设计的技术壁垒,为构建智能、易用的AI增强型GIS应用提供了制图模块智能化的新思路。
论文第一作者为我校地图学与地理信息科学专业在读博士生汤子豪,通讯作者为乐松山教授。该研究得到了国家自然科学基金面上项目42471466、42171406的支持。
论文链接:https://www.sciencedirect.com/science/article/pii/S1569843225007204
引用格式:Tang, Z., Yue, S., Mu, F., Shu, Y., Sun, Z., & Wen, Y. (2026). MapMate: A framework bridging natural language interaction and map design through large language models. International Journal of Applied Earth Observation and Geoinformation, 146, 105073. https://doi.org/10.1016/j.jag.2025.105073
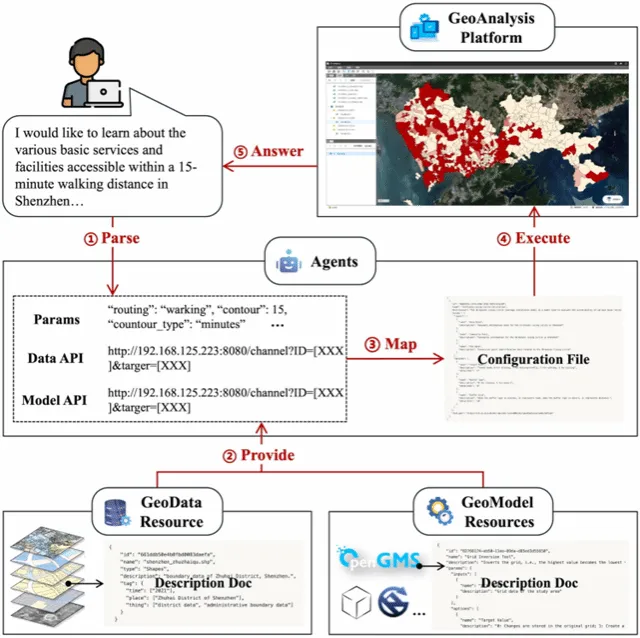
成果二:RDMA——面向区域决策支持的多智能体协同框架
该研究提出了区域决策智能体(RDMA)框架,面向城市规划、环境管理等领域中复杂区域决策需求,探索异构地理数据与模型的可靠集成路径。传统专家驱动的决策模式依赖人工配置数据与模型,效率低下且存在知识盲区;现有基于大语言模型的智能体虽具备资源整合潜力,但在处理异构地理空间数据与模型时仍面临输出可靠性不足的挑战。RDMA由数据治理、模型治理和智能体调度三个模块构成,并通过知识增强的检索增强生成(RAG)、置信度自评估与系统透明化三项策略有效缓解大语言模型幻觉问题。性能评估表明,RDMA在模型配置与工作流组合层面均展现出高成功率与高精度,城市规划与雨水管理案例研究进一步验证了其支持可持续区域治理的实用价值。
论文第一作者为我校地图学与地理信息科学专业在读博士生孙卓,通讯作者为乐松山教授。该研究得到了国家自然科学基金面上项目42471466、42171406的支持。
论文链接:https://www.tandfonline.com/doi/full/10.1080/13658816.2026.2639623
引用格式:Sun, Z., Yue, S., Yu, K., Mu, F., Tang, Z., & Wen, Y. (2026). Regional decision-making agent: enhancing geographic decision support through structured resource governance and multi-agent collaboration. International Journal of Geographical Information Science, 1-27. https://doi.org/10.1080/13658816.2026.2639623
以上内容来源于定量遥感+,为学术分享,仅供科研交流,如有错误/侵权等,请联系修改或删除。联系方式:Novel_2020