南京航空航天大学聂宏教授团队:可复用灵巧型对接机构力学分析与优化设计 | 小卫星规模化应用关键技术专刊
- 2026-06-16 15:33:26

随着航天技术的持续进步,人类空间活动日趋频繁,在轨维修、升级与装配已成为小卫星集群化协同应用领域的研究热点。对接机构作为上述过程的核心执行单元,承担着传递对接载荷、实现航天器间刚性连接及分离释放的关键功能。与传统大型对接机构不同,小卫星平台受严格的尺寸、质量与成本约束,要求对接机构向灵巧化与集成化方向发展。
为进一步提升小卫星小型化对接机构性能,众多学者开展了优化方法研究,但现有研究多侧重于单一性能指标的独立优化,未能系统性地揭示并协同优化多个关键性能指标之间存在的耦合关系。接触应力、容差能力及接触力是决定对接性能的关键因素,这些因素在很大程度上受接纳锥锥角这一核心设计变量的影响。本文提出了一种可复用灵巧型机–电对接机构,并基于现有的优化算法进行改进,完成对该机构锁定拉紧组件和对接组件的优化设计。
引用格式
王宸, 李云峰, 范晏恺, 等. 可复用灵巧型对接机构力学分析与优化设计[J]. 宇航学报, 2026, 47(3): 763-776.
WANG Chen, LI Yunfeng, FAN Yankai, et al. Mechanical analysis and optimization design of reusable dexterous docking mechanism[J]. Journal of Astronautics, 2026, 47(3): 763-776.
本文首先介绍基于形状记忆合金弹簧的在轨对接锁释机构,完成其驱动结构的力学分析,建立对接过程的捕获空间与力学模型;其次通过多种智能优化算法对二级锁定拉紧机构进行质量优化;针对对接接触问题,通过改进现有多目标优化算法,完成接纳锥梯度锥角的优化设计;最后通过仿真验证梯度角度多目标优化的有效性及其在工程应用的优势。
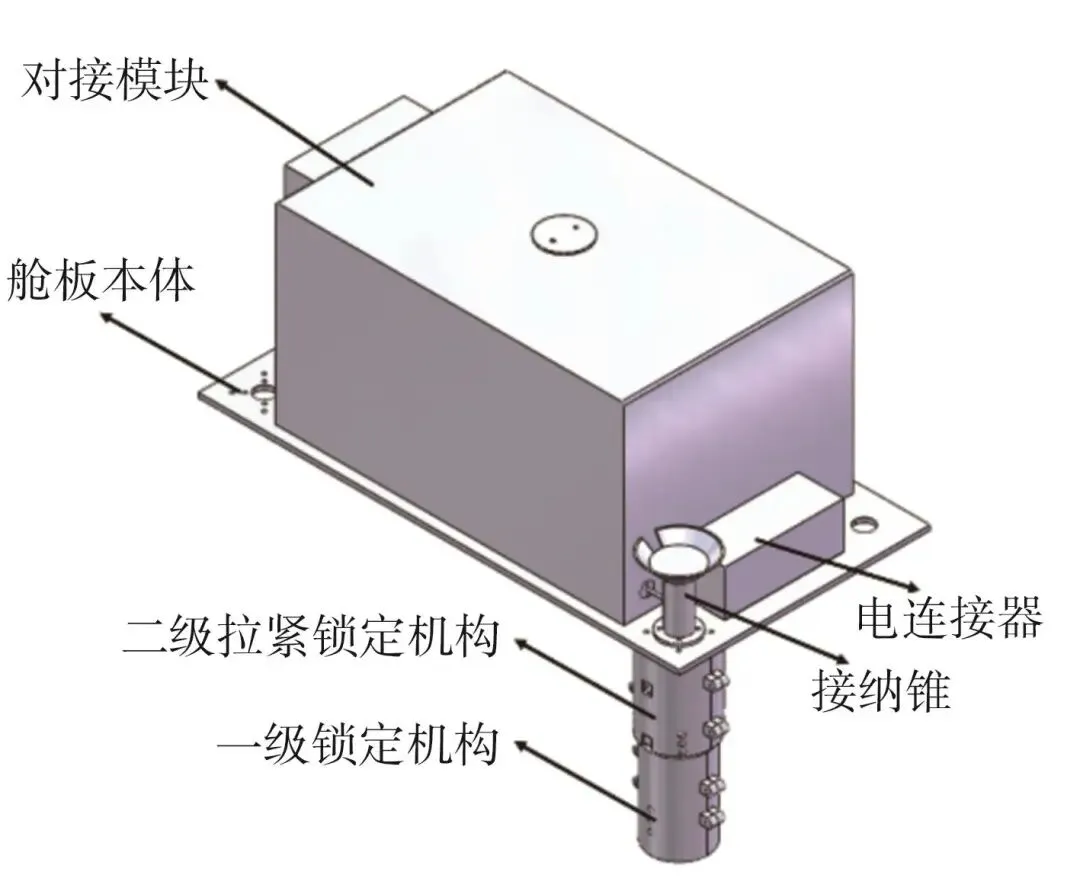
图1 基于形状记忆合金弹簧的在轨对接锁释机构
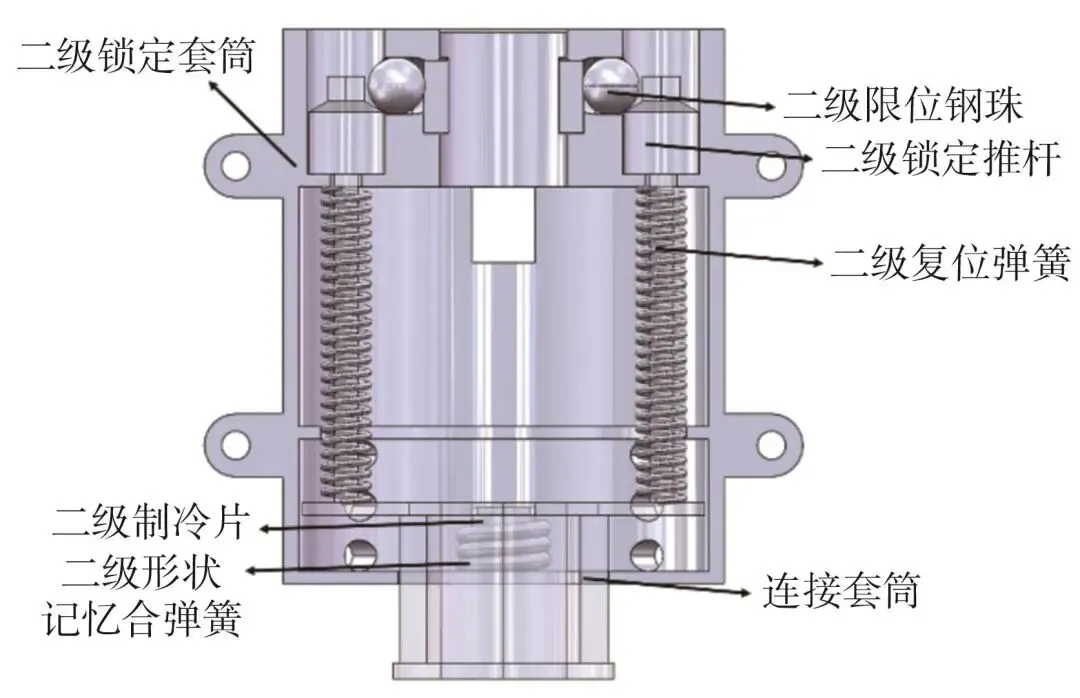
图2 二级拉紧锁定机构结构示意图
针对传统驱动元件体积大、质量重以及机电连接方案不足的问题,引入形状记忆合金(SMA)弹簧作为核心驱动元件,并创新性地设计了“楔形锁”两级拉紧锁定结构。该机构不仅实现了大容差范围下的抗阻力连接,还通过机械-电气一体化设计,为航天器在轨升级、更换与加注提供了有效的硬件支持。
针对接纳锥梯度锥角设计中多个冲突性能指标的优化难题,对多目标黏菌优化算法(SMA)与多目标算术优化算法(AOA)的位置更新策略进行了改进,并提出了一种全新的多目标混合黏菌算术优化算法。该算法通过融合两种元启发式算法的搜索机制,提升了多目标寻优的精度与多样性。
建立了以“最小化最大接触应力、最大化平均切向接触力、最大化捕获半径”为核心的优化目标体系,实现了对锁定杆与接纳锥接触界面的多目标协同优化。在此基础上,引入熵权TOPSIS方法对算法所得的Pareto最优解集进行综合评估与决策,从而在多个冲突目标间取得最佳平衡,获得了兼顾力学性能与容差能力的梯度锥角工程设计方案。经熵权TOPSIS决策,优化后最大接触应力降低23.50%,平均接触力提升41.81%,捕获半径差增大95.92%。
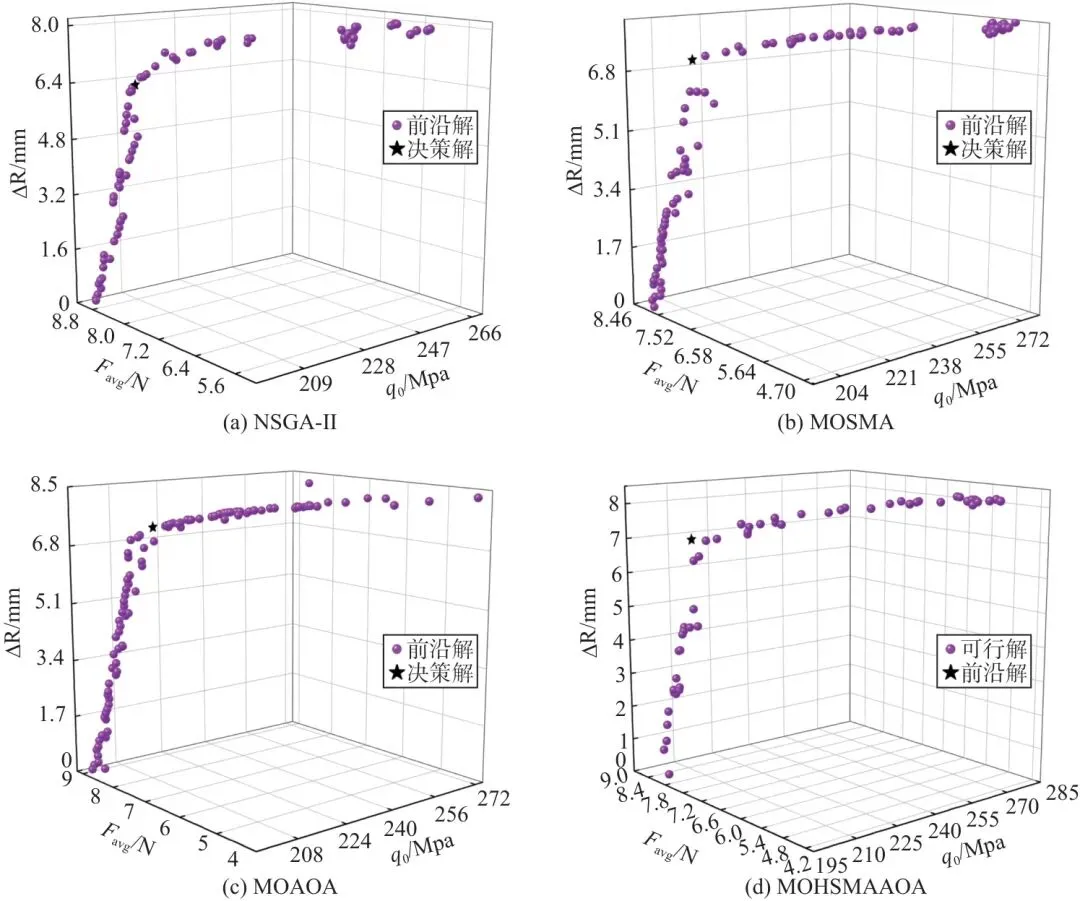
图3 基于各算法接纳锥梯度角度优化设计的Pareto解集
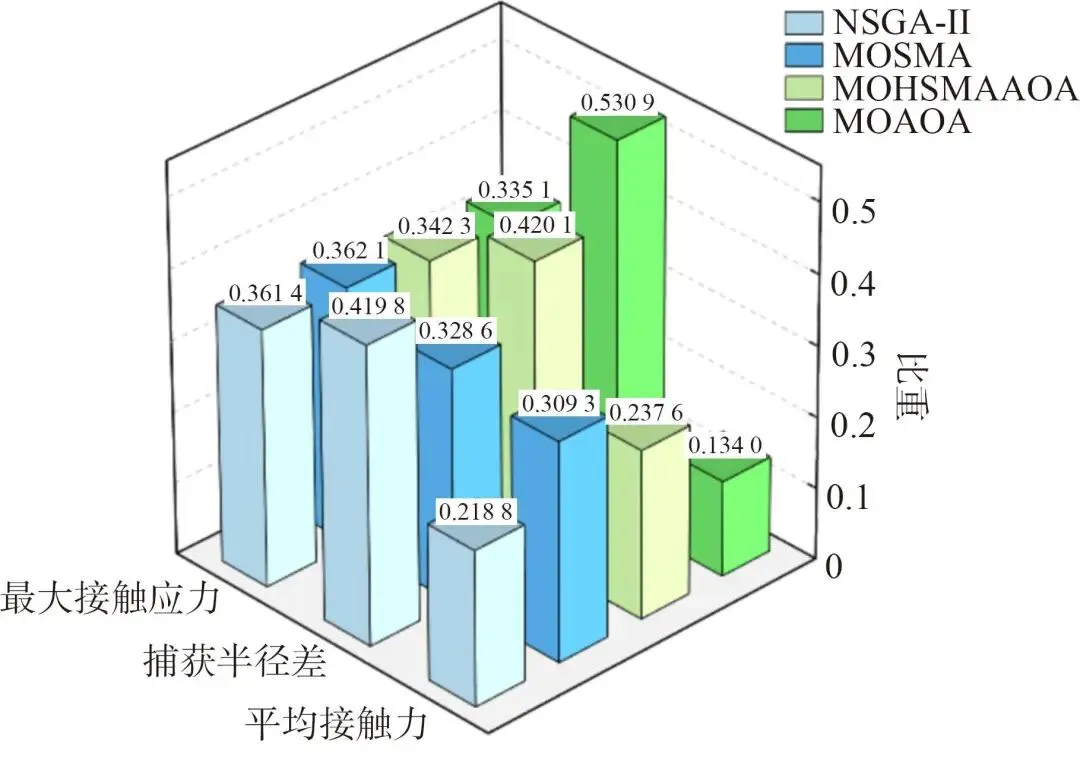
图4 基于各算法Pareto前沿解的目标函数权重
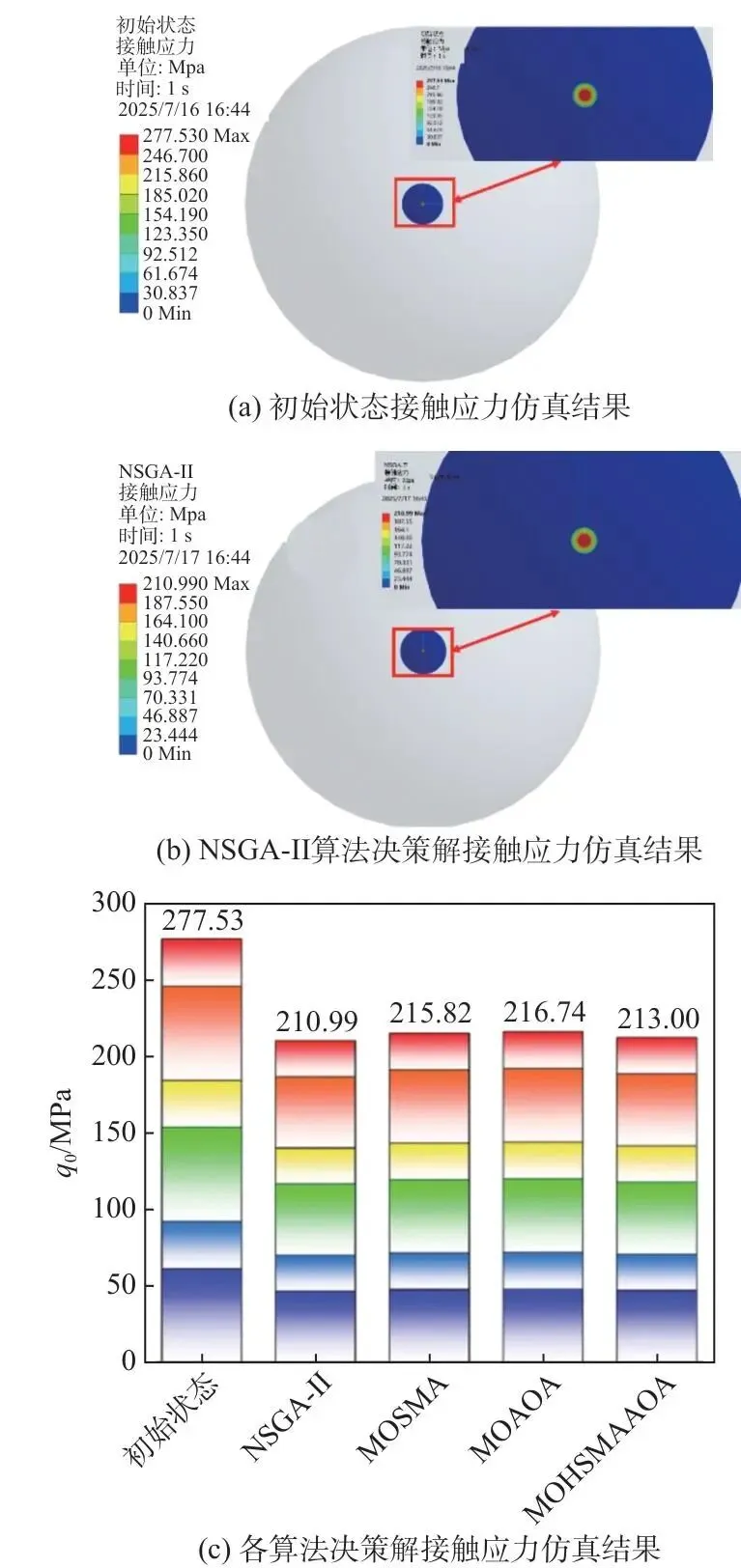
图5 初始状态及各算法接触应力仿真结果
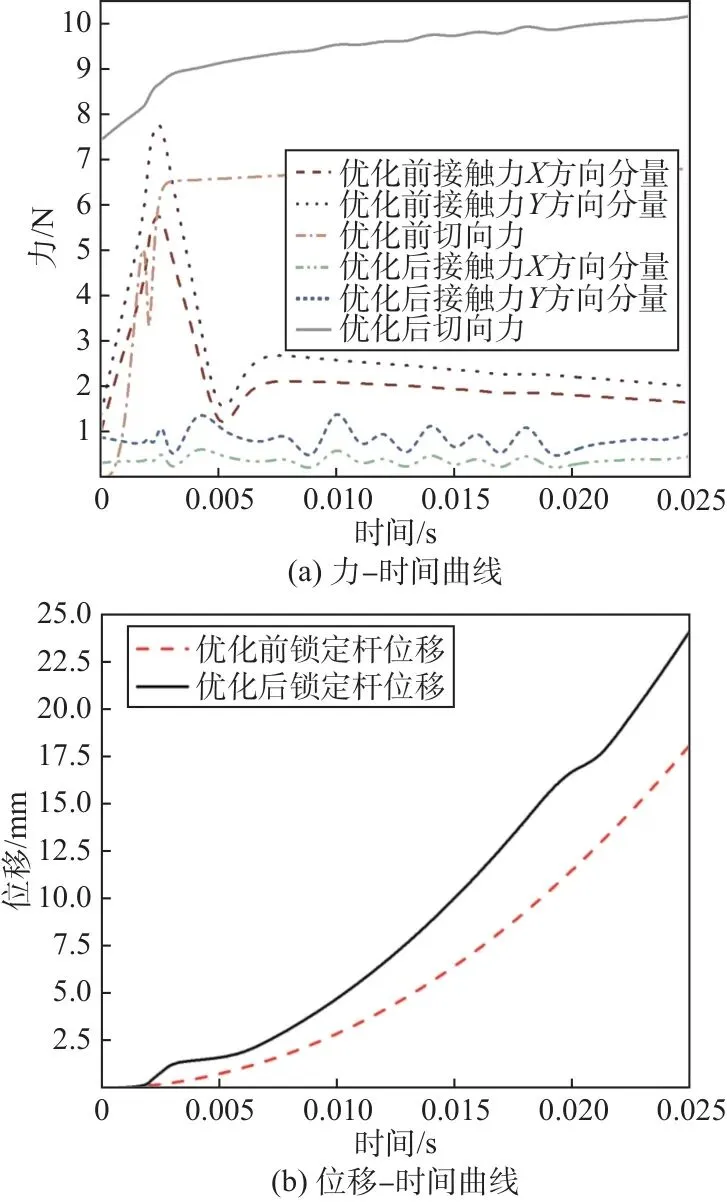
图6 MOHSMAAOA算法优化前后对接过程仿真
该方法可应用于航天器在轨服务领域小卫星可更换模块的重复对接锁释,为轻量化、机电一体化在轨连接提供支撑,对相关领域空间智能装配与跨域捕获机构设计的拓展具有一定的借鉴价值。
南京航空航天大学航天器先进结构机构与控制团队,以聂宏、陈金宝教授为带头人。团队面向国家重大工程对空间机构的大型化、高精度、高可靠和智能化发展要求,开展航天器着陆缓冲机构、大型可展机构、在轨/星表精密驱动与操控、高超声速飞行器控制及一体化融合设计等相关领域研究。团队依托宇航空间机构全国重点实验室,围绕重大航天任务开展应用基础和技术攻关研究,取得了一系列创新性、原创性的科研成果。
《宇航学报》“智能多源自主导航技术”专题 | 2026年4月30日截稿
《宇航学报》“北斗全球卫星导航计划实施二十周年纪念专题” | 2026年5月30日截稿
《宇航学报》联合国防科技大学“第四届国防科技高地论坛”——空天前沿技术专刊 | 2026年5月31日截稿
《宇航学报》“高速飞行器智能决策与控制方法及前沿技术”专刊暨专题学术论坛 | 2026年6月30日截稿
《宇航学报》“新型空间转移运输技术”专刊 | 2026年6月30日截稿

版权声明:对于本平台刊登的《宇航学报》所有稿件,均已按有关规定与作者签署版权转让协议,《宇航学报》享有稿件的信息网络传播权。其他平台转载信息请与本号联系授权,并标注原作者和信息来源为《宇航学报》编辑部。
编 辑 /
秦子睿
审 核 /
曹亚君 郭筱曦
监 制 /
姜 军


