AFM | 苏州医工所郭凯团队:蜂巢启发的用于多功能机器人系统模块化设计的PPAMs软体致动器
- 2026-05-25 08:45:19


气体驱动是现在软体直线和弯曲致动器中一种常用的驱动方法,包括正压驱动和负压驱动。然而在驱动的过程中,常常伴随着致动器体积的显著膨胀,即使是负压驱动,致动器体积也无明显缩小,此外,传统软体致动器硅胶浇铸的制造方法过程繁琐且耗时较长,这些因素共同制约了基于软体致动器的机器人的多功能性和制造便捷性。
近期,中国科学院苏州生物医学工程技术研究所郭凯副研究员团队受蜂巢轮廓形状的启发,提出了两种褶皱气动软体致动器(图1),用于直线致动的HLA(Honeycomb-inspired Linear Actuator)和用于弯曲致动的HBA(Honeycomb-inspired Bending Actuator),通过设置一组相同的截面参数并结合应变限制层,同时实现了这两种运动形式致动器的设计。
2026年1月12日,该工作以“Honeycomb-inspired PPAMs Soft Actuators for the Modular Design of Versatile Robotic Systems”为题发表在Advanced Functional Materials上(Advanced Functional Materials, 2026; 0:e27277)。文章第一作者是中国科学技术大学生物医学与工程学院(苏州医工所)硕士生张宇泽,通讯作者为中国科学院苏州医工所郭凯副研究员,中国科大苏州高等研究院潘挺睿教授以及哈尔滨工业大学刘英想教授。该研究得到国家重点研发项目智能机器人专项的支持。
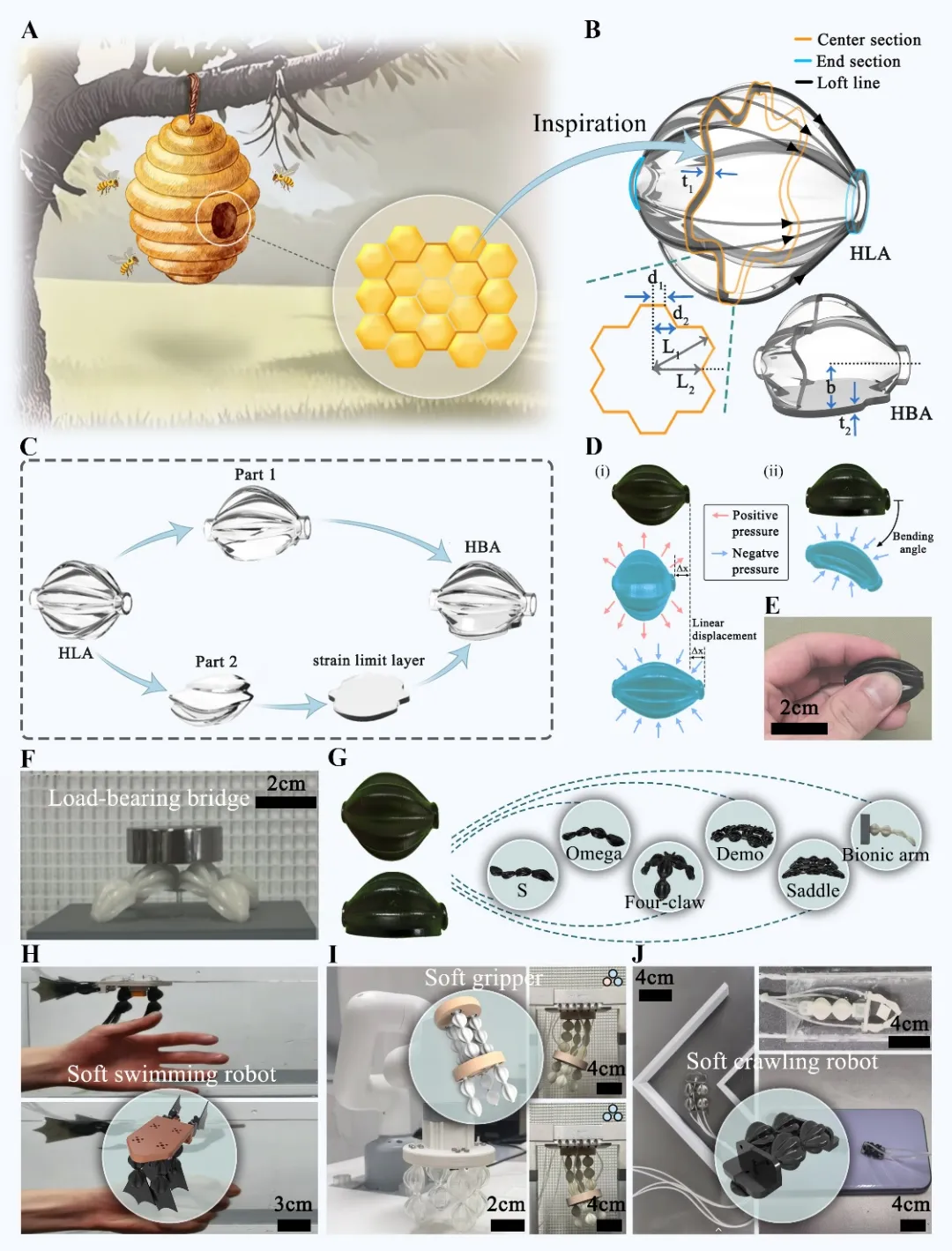
图1. 蜂窝启发的线性驱动器(HLA)和弯曲驱动器(HBA)的设计。(A) HLA 和 HBA 的设计均受到蜂窝截面轮廓和主轴结构的启发。(B) 中心截面向两侧的圆形端口延伸完成 HLA 的设计。(C) 在径向一侧施加应变限制层以完成 HBA 的设计。(D) HLA 和 HBA 的正压和负压驱动。(E) 由 65A 树脂制成的驱动器具有较好的柔软性。(F) 基于 HBA 的承重桥可抬起 500 克重物。(G) 基于 HLA 或 HBA 的模块化结构。(H-J) 基于 HLA 或 HBA 单元的软机器人。
区别于传统的FEA(Fluid elastomer actuation)原理,本研究创新性的将PPAMs(Pleated Pneumatic Artificial Muscles)原理与气动弯曲致动器的设计相结合,通过施加载荷时褶皱的外展内收来产生弯曲致动。对致动器进行了多方面的性能表征(图2),结果显示所提出的弯曲致动器(HBA)在负压载荷的驱动下可以同时实现最大37°的弯曲角度以及78%的体积缩小,并可通过LCD光固化3D打印技术直接一体批量化成型,提高了制造速度并降低了制造复杂性。
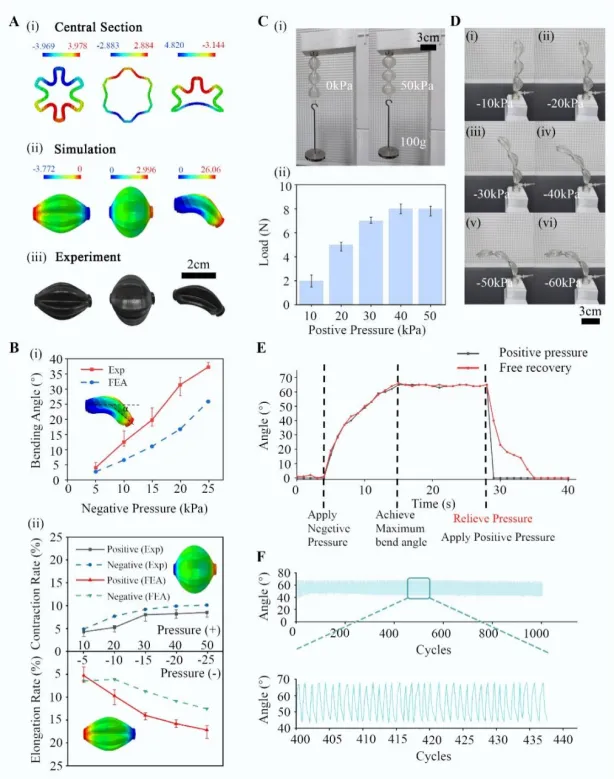
图2. HLA 和 HBA 的性能表征。(A) 在 -25kPa、40kPa(HLA)和 -40kPa(HBA)压强下,HLA 和 HBA 的 (i) 中央截面变形、(ii) 通过有限元(FE)仿真得到的致动器轴向位移及弯曲角度、(iii) 轴向位移和弯曲角度的实验测量结果,以与仿真进行比较。(B) 在负压范围从 0 到 -50kPa(HBA)、10kPa 到 50kPa(HLA,正压)、-5kPa 到 -25kPa(HLA,负压)条件下,比对有限元仿真与实验得到的 (i) HBA 的弯曲角度、(ii) HLA 的伸长和收缩率。(C) (i) 三串联 HLA 在 50kPa 压强作用下提升 100g 重物;(ii) 3串联HLA在 10kPa 到 50kPa压强条件下的承载能力。(D) 3串联HBA在驱动压强从-10kPa到-60kPa下的弯曲变形。(E) HBA在施加正压和自由回弹下的恢复速度比较。(F) HBA的无负载循环测试(超过1000次循环)。
团队还提出了一种模块化设计方法,通过与以上致动器相结合,设计了多种不同形式的软体结构,包括S形,Ω形,四爪形,椭球形和马鞍形面结构(图3),仿生手臂结构以及承重桥结构(图4),展示出了极大的结构设计广度。
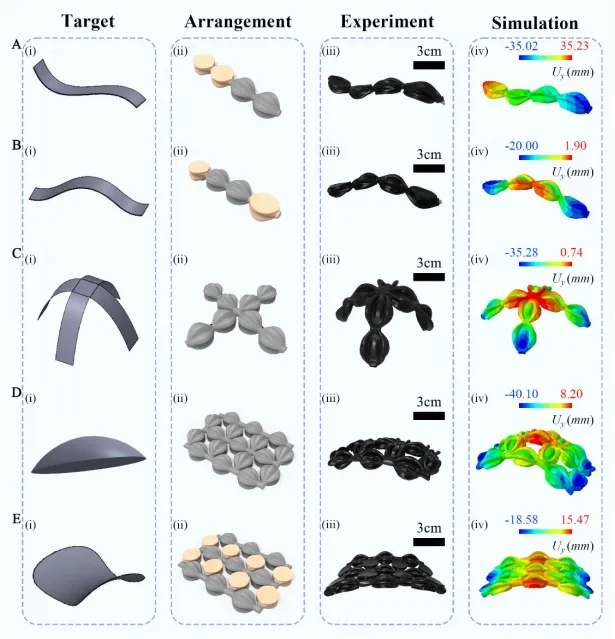
图3. HBA实现的各种结构形状。S形(A (i) 到 (iv))、Ω形(B (i) 到 (iv))、四爪形(C (i) 到 (iv))、圆顶形(D (i) 到 (iv))和马鞍形(E (i) 到 (iv))结构的目标形状、HBA的排列、实验结果及有限元模拟结构。
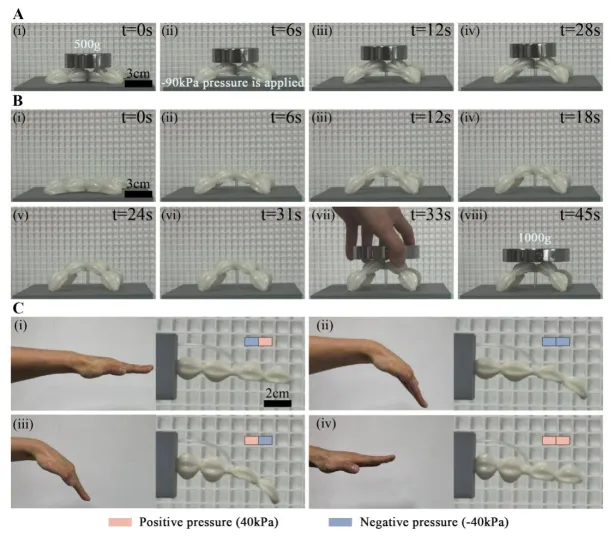
图4. 基于HLA和HBA的结构作为承重桥以及仿生运动的实现。(A) 对基于HBA的承重桥结构(材料:KS-200)施加-90kPa的负压以提升500克的重量(自身重量的14.6倍)。(B) 对基于HBA的承重桥结构(材料:KS-200)施加-90kPa的负压以承受1000克的重量(为其自身重量的29.2倍)。(C) 结合HBA和HLA单元以模拟手腕和手臂的运动,(i) 手臂向前伸展,(ii) 手腕屈曲,(iii) 手臂向后伸展,(iv) 手腕伸直。
此外,团队开发了三种机器人系统用于展示致动器的应用以及模块化设计方法的优势。首先是一款集成了六个模块化设计HBA致动器的游泳机器人(图5),通过施加不同频率的压强载荷,机器人在极低的致动频率(0.25Hz)下就可以实现较快的运动速度(大于50mm/s),通过肌电信号控制六个HBA单元产生不同的致动组合,该机器人实现了包括下沉、上浮、转向、侧翻回复等多种形式的运动。
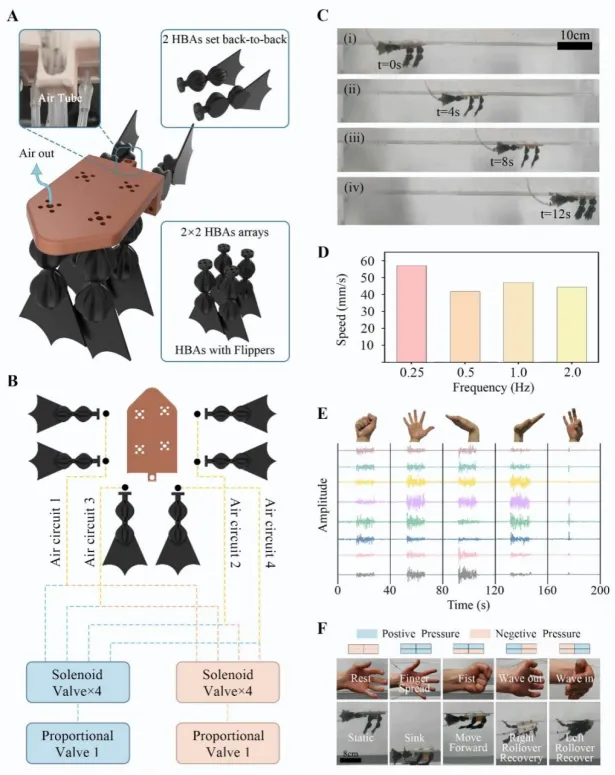
图5. 游泳机器人的设计、控制及性能表征。(A) 游泳机器人的设计,包括一个FDM打印机打印的主体和6个带鳍的HBA。(B) 控制系统与机器人的气动连接。(C) 游泳机器人在0.25Hz驱动频率下的运动展示。(D) 机器人在不同驱动频率下的速度。(E) 进行各种手势时,被myo臂环记录的sEMG信号。(F) HBA状态、游泳机器人运动与手势动作的对应关系。
第二,团队开发了一款软体夹持器(图6),内部集成了3个模块化设计的HLA致动器以及3个HBA致动器。通过控制上方的HLA致动器,该夹持器可以向六个方向自由转动,并可以在-90kPa压强的致动下,实现2100g(56.9倍自重)物体的夹取。此外,夹持器还被集成到机械臂末端并与脑电帽相结合,实现了基于ssvep范式的机械臂脑电控制。
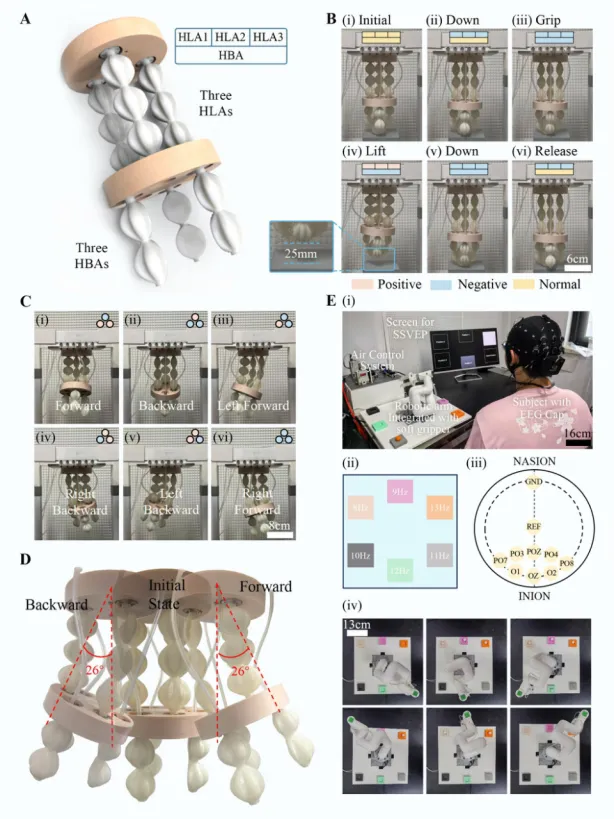
图6. 软体夹持器的设计与性能表征。(A) 软体夹持器的设计,包括两个FDM打印部件、三个三串联HLA和三个二串联HBA。(B) 软体夹持器抓取物体并放回的过程展示。(C) 通过对三个HLA施加不同的压强载荷,实现了软体夹持器向不同方向的旋转运动。(D) 软体夹持器向前和向后运动的表征。(E) 软体夹持器结合机械臂和脑电控制的应用展示。
最后,团队结合真空吸盘,开发了一款软体爬行机器人(图7和图8),可以完成穿越复杂轨道,黑线循迹,攀爬坡道,推动重物,狭窄空间取物等多样化的作业任务,展示出了模块化设计方法赋予的极高多功能性。此外,通过将机器人系统等比例缩放,实现了爬行机器人的微型化(长19.5mm,宽9.5mm,重0.5g)。
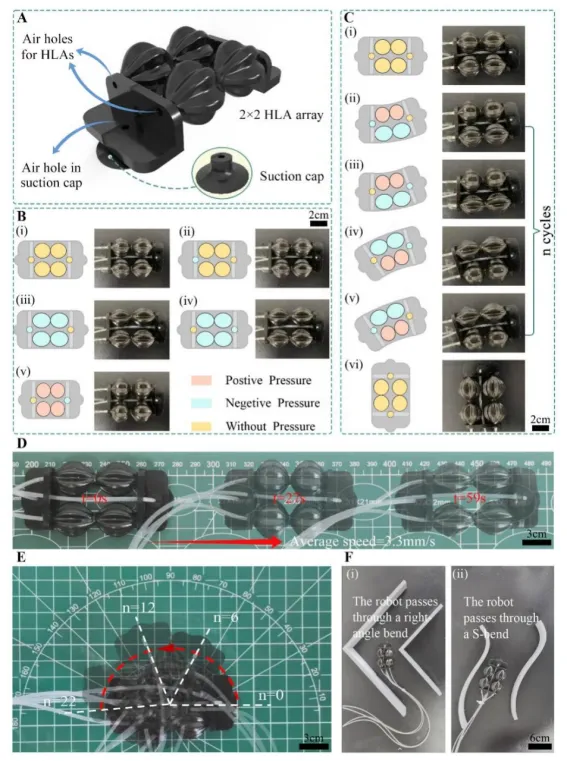
图7. 软体爬行机器人的设计与运动。(A) 软体爬行机器人的设计,包括LCD 3D打印的主体,由两个串联的HLA和两个真空吸盘。(B) 软体爬行机器人的直行步态。(C) 软体爬行机器人的转弯步态。(D) 软体爬行机器人在1Hz致动频率下直行展示。(E) 软体爬行机器人在1Hz致动频率下向左转180°展示。(F) 软体爬行机器人通过直角弯和S形弯道。
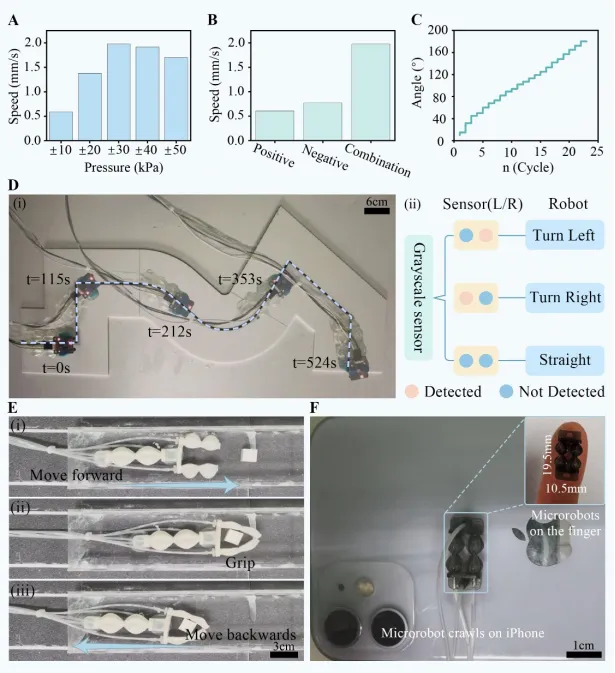
图8. 不同材料制造的软体爬行机器人展示。(A) 不同驱动压强下软爬行机器人的速度。(B) 机器人在正压、负压及其组合驱动条件下的速度比较。(C) 机器人在不同转动周期下的转角。(D) 由80A树脂制成的爬行机器人循迹功能展示。(E) 爬行机器人从方形管中取出物体展示。(F) 微型软爬行机器人在iPhone手机上的运动展示。
这项研究工作极大的缩小了气动软体致动器工作时的体积并赋予了机器人系统极高的多功能性,为之后气动软体机器人在狭窄空间中的应用以及功能多样化的提升提供了新的参考范式。
原文链接:https://advanced.onlinelibrary.wiley.com/doi/10.1002/adfm.202527277
相关进展
福州大学林腾飞副教授、福州大学附属省立医院郑晓春教授团队 Small:高亮度荧光仿生软体致动器
湖南大学赵岩/南洋理工大学周琨教授团队 APR:生物启发的形状可编程磁响应多孔软体致动器
东南大学刘宏教授课题组:具有仿生自主形变能力的液态金属软体致动器


