集成了多维信息(光谱、空间、时间等)的仿生视觉系统为感知物理世界中的视觉场景提供了有效的计算范式。利用具有多维信息处理功能的视觉传感器将复杂的光学信息分解为可见光和紫外光通道以分别进行感知和处理是构建四色视觉系统的基础。最近,柔性电子全国重点实验室、南京邮电大学材料科学与工程学院凌海峰教授团队通过调制光生激子在并五苯和氧化锌薄膜之间的传输运动力学,成功在单个光电晶体管中实现了波长依赖的易失性正光电导(PPC)和非易失性负光导(NPC)特性。受自然界中驯鹿四色视觉系统的启发,该团队构建了可以有效地提取和识别可见物体类型(99%)和紫外物体运动方向(97%)的传感器内四色视觉系统。该工作为智能人工视觉系统提供了新颖的硬件平台。
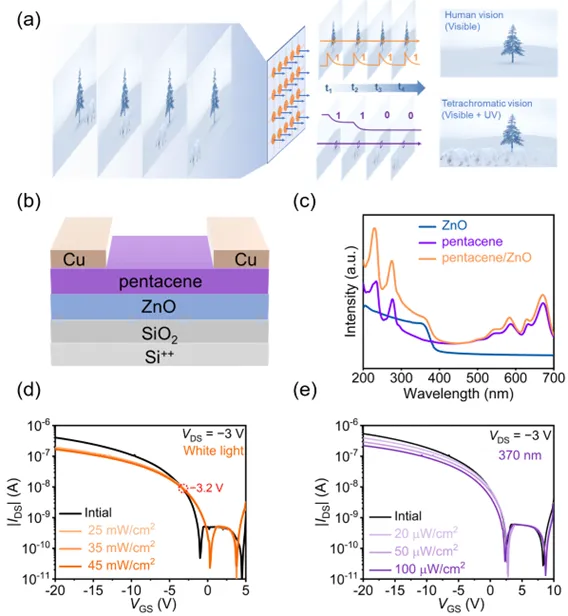
图1. (a)传感器内运动感知的仿生四色视觉示意图;(b)器件结构示意图;(c)并五苯和氧化锌薄膜的紫外-可见吸收光谱;(d)白光照射以及(e)紫外光照射下器件的转移曲线。
在该光电晶体管中,并五苯薄膜作为可见光光敏层,氧化锌薄膜作为紫外光光敏层,如图1所示。通过选取适当的栅极电压,光电晶体管在白光照射下展现出PPC特性。相反,在紫外光刺激下,器件均表现出NPC特性。因此,光电晶体管波长依赖的PPC和NPC特性为独立感知光谱维度的信息提供了可能性。
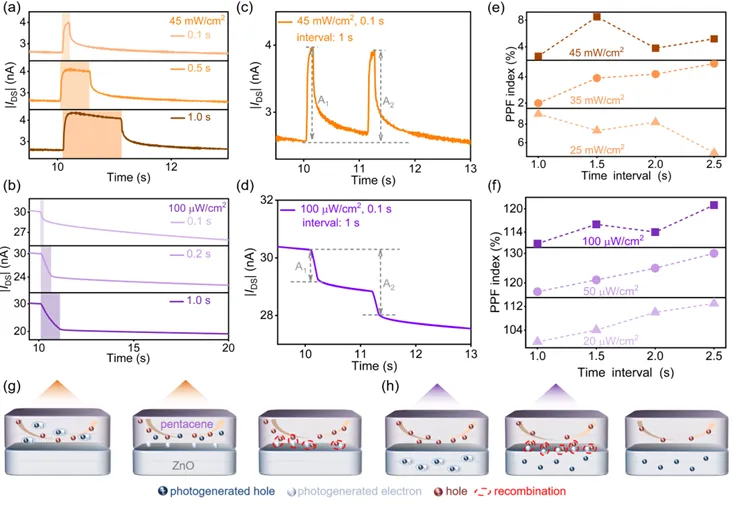
图2. (a)由白光触发的易失性PPC行为;(b)由紫外光触发的非易失性NPC行为;(c)由白光和(d)紫外光触发的PPF行为;(e)由白光和(f)紫外光触发的PPF指数。在(g)白光和(h)紫外光刺激下的工作机制示意图。
多维信息处理的核心在于在每个维度上实现差异化的响应。除了光谱维度的信息外,视觉场景还包含空间维度和时间维度的信息。物体表面反射的光线强度会随着距离的增加而减弱。因此,通过感知和处理光线强度的空间变化,可以获取相应物体的空间信息。如图2所示,器件在白光脉冲刺激下展现出易失性的PPC行为,而在紫外光脉冲刺激下展现出非易失性的NPC行为。这种波长依赖的差异性响应特性是由于栅极电压控制下的并五苯和氧化锌中的光生激子转移所导致的。
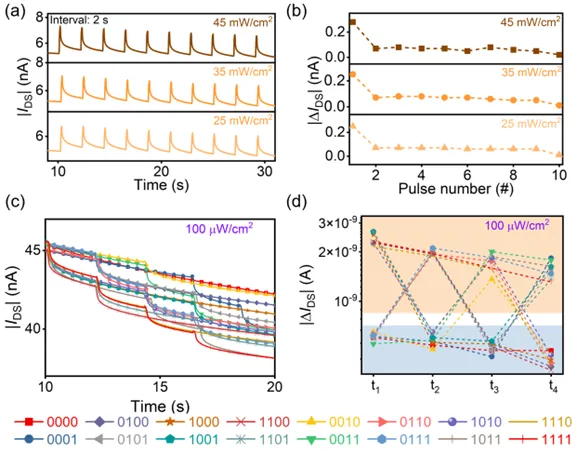
图3. (a)连续10次白光脉冲刺激下的电流曲线和(b)电流变化曲线;(c)“0000”-“1111”紫外光脉冲刺激下的电流曲线和(d)电流变化曲线。
随后,该团队对光电晶体管同时处理光谱、空间和时间信息的能力进行了研究,如图3所示。由于器件对可见光的易失性PPC特性,在连续的白光脉冲下电流无法耦合到更高的值,且电流变化量可忽略不计。相反,由于器件对紫外光的非易失性NPC特性,在连续的紫外光脉冲下电流逐渐被抑制到更低的水平。因此,在连续的时序刺激下产生的与波长依赖的电流变化启发了一种在复杂环境中融合和处理多维信息的策略。
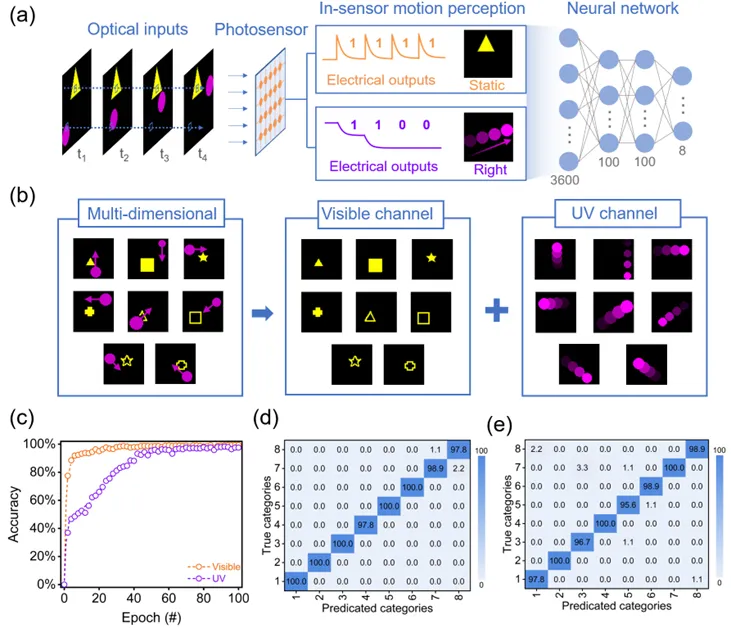
图4. (a)传感器内四色运动感知简化示意图;(b)多维信息处理示意图;(c)可见物体类型(99%)以及紫外物体运动方向(97%)的识别准确率;(d)可见物体类型和(e)紫外物体运动方向的混淆矩阵。
随后,通过将具有多维信息处理功能的光电晶体管作为光电传感器,该团队构建了一个用于运动感知的传感器内四色视觉系统,如图4所示。结果表明,基于对光谱、空间和时间信息的波长依赖性响应,原本混合的可见和紫外目标物体的运动轨迹被分别提取出来,并在两个独立的通道中进行显示。最后,结合简单的神经网络,该系统能够准确区分可见物体的类型(99%)以及紫外物体的运动方向(97%)。这项工作为人工视觉系统的开发提供了新的思路。
凌海峰,柔性电子全国重点实验室、南京邮电大学材料科学与工程学院教授,类脑电子材料与器件江苏高校重点实验室主任,中组部青年拔尖人才,江苏省杰出青年基金获得者。课题组主要从事有机半导体存储器的研究工作,在Nature Communications、Advanced Materials、Applied Physics Letters等期刊上发表论文100余篇,主编出版《有机薄膜晶体管存储器》专著1部。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
