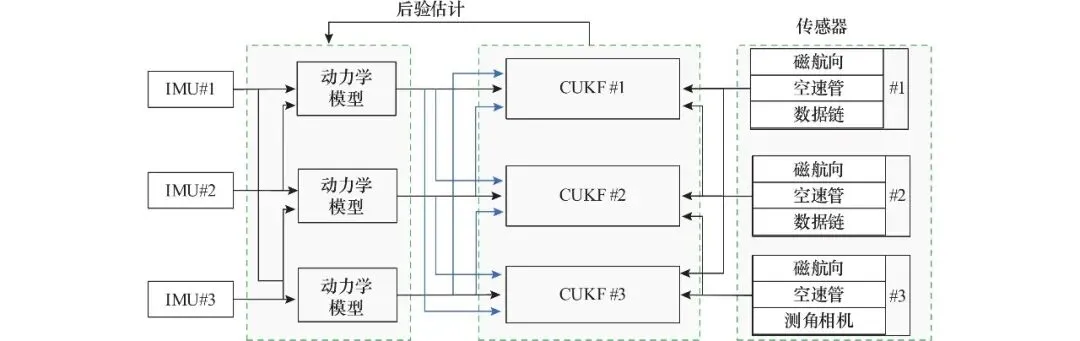
摘要:针对卫星导航拒止环境中飞行器编队欠测量相对导航难题,提出一种编队成员之间仅测距离或视线角度的协同相对导航方法。首先,以相对位置、航向角差、速度为基础并纳入传感器有色噪声在内,建立了相对运动状态模型。然后,建立了由仅测距或仅测角两种相对测量和飞行器航向、空速测量信息组成的测量模型,在此基础上引入李导数理论对相对导航状态进行了可观测性分析,获得了激励系统状态可观测性的充分条件。接着,以三个飞行器构成编组并建立几何拓扑一致性约束模型,在此基础上设计了基于一致性无味卡尔曼滤波(consensus unscented Kalman filter,CUKF)算法的分布式估计算法。最后,对所提方法进行了Monte Carlo打靶仿真验证,仿真结果表明,飞行器的运动满足可观测性条件时相对导航状态是可观测的,几何拓扑一致性约束的引入确实提升了系统可观测性,三机编队时混合测量方式相比全员仅测距或测角更具优势,相对位置的估计误差不超过5 m/轴(3σ)。
关键词: 飞行器编队, 相对导航, 可观测性分析, 一致性无味卡尔曼滤波
出版信息:系统工程与电子技术, 2026, 48(1): 265-277.