南京大学王漱明团队在Science Advances发表可扩展广义超表面扳手实现并行多任务光操控
- 2026-05-21 21:52:50

点击蓝字 关注我们
栏目介绍
「“论文快讯”栏目旨在精简地分享一周内发表在高水平期刊上的Metasurface领域研究成果,帮助读者及时了解领域前沿动态,如果对专栏的写法或内容有什么建议欢迎留言,后续会陆续开通其他专栏,敬请期待。」
一
论文基本信息
标题:
Scalable generalized meta-spanners enabling parallel multitasking optical manipulation
作者:
共同一作:Tianyue Li(南京大学物理学院);共同一作:Wenyu Gao(中国科学院西安光学精密机械研究所);共同一作:Boyan Fu(南京大学物理学院);Tianhua Shao(南京大学物理学院);Yuchao Fu(洛桑联邦理工学院纳米光子学与计量实验室);Siarhei Zavatski(洛桑联邦理工学院纳米光子学与计量实验室);Jeeban Kumar Nayak(洛桑联邦理工学院纳米光子学与计量实验室);Shaohui Yan(中国科学院西安光学精密机械研究所);通讯作者: Xiaohao Xu(中国科学院西安光学精密机械研究所);通讯作者: Shuming Wang(南京大学物理学院);详细介绍可见:[超表面领域大牛-18] 南京大学-王漱明-国家杰青通讯作者: Baoli Yao(中国科学院西安光学精密机械研究所);Zhenlin Wang(南京大学物理学院);详细介绍可见:[超表面领域大牛-17] 南京大学-王振林-国家杰青|长江|南京大学副校长Shining Zhu(南京大学物理学院);详细介绍可见:[超表面领域大牛-2]南京大学-祝世宁-中国科学院院士Olivier J. F. Martin(洛桑联邦理工学院纳米光子学与计量实验室);通讯作者: C. T. Chan(香港科技大学物理学系);详细介绍可见:[超表面领域大牛-10] 香港科技大学-陈子亭-香港科技大学副校长
发表时间:
2026年04月08日(其中2025年10月31日投稿,2026年03月10日接收)
发表期刊:
Science Advances(JCR-Q1,IF=12.5)

二
论文重要图文
摘要:
光学镊子与光学扳手能够实现非接触操控,但传统方案通常依赖体积较大的离散光学系统,生成模式固定,且更多关注力的大小而非颗粒轨迹的精细塑形,因此难以同时兼顾小型化、可重构与并行多任务操控;即便近年来超表面已能高效产生轨道角动量光场,面向颗粒输运的复杂轨迹塑形、纵向多任务切换以及同平面多点协同操控仍然受到衍射损耗、相位单一调控和通道数量有限等约束。针对这一研究空缺,南京大学团队提出了基于超表面的广义光学扳手——广义超表面扳手(GOMS),通过复振幅超表面直接生成无散斑、可定制的广义光涡旋,并结合圆偏振入射与输出态切换,在不同传播平面和同一横向平面内实现多种闭合轨迹的并行操控;其核心思路类似于把原本只能“拧动”颗粒的环形光场,改造成可按预定几何轮廓驱动颗粒运动的“光学扳手组”。实验中,作者实现了三角形、四边形、五边形、六边形、七边形和圆形等多种轨迹下的稳定单颗粒操控,对应轨道速度分别为26.8、21.2、25.5、21.4、18.2和24.4 μm/s,并进一步在焦平面内实现四组SiO2颗粒“项链”阵列同步、互不干扰的顺时针或逆时针旋转,显示出可扩展的并行多任务稳定性与多通道重构能力。该成果以 Scalable generalized meta-spanners enabling parallel multitasking optical manipulation 为题,于2026年04月08日发表于《Science Advances》。
重要图片:
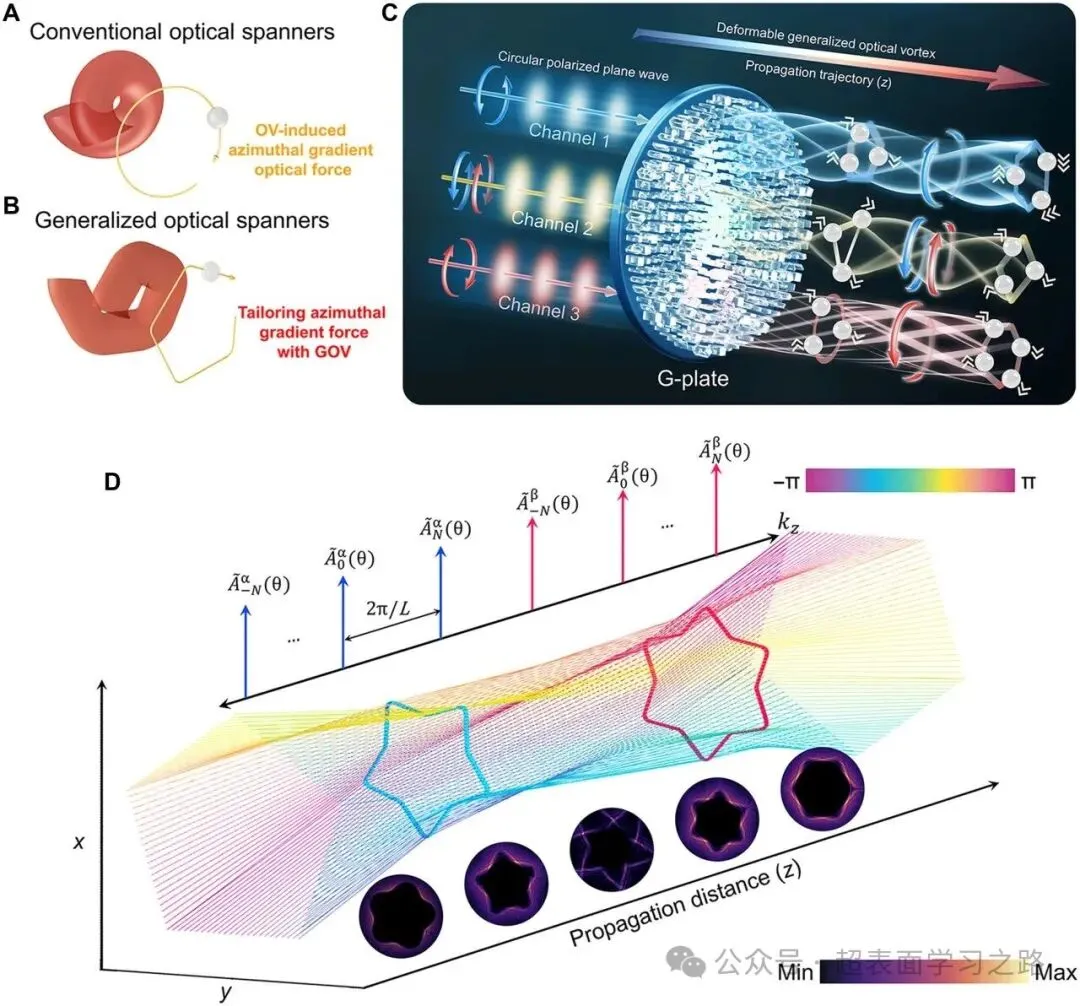
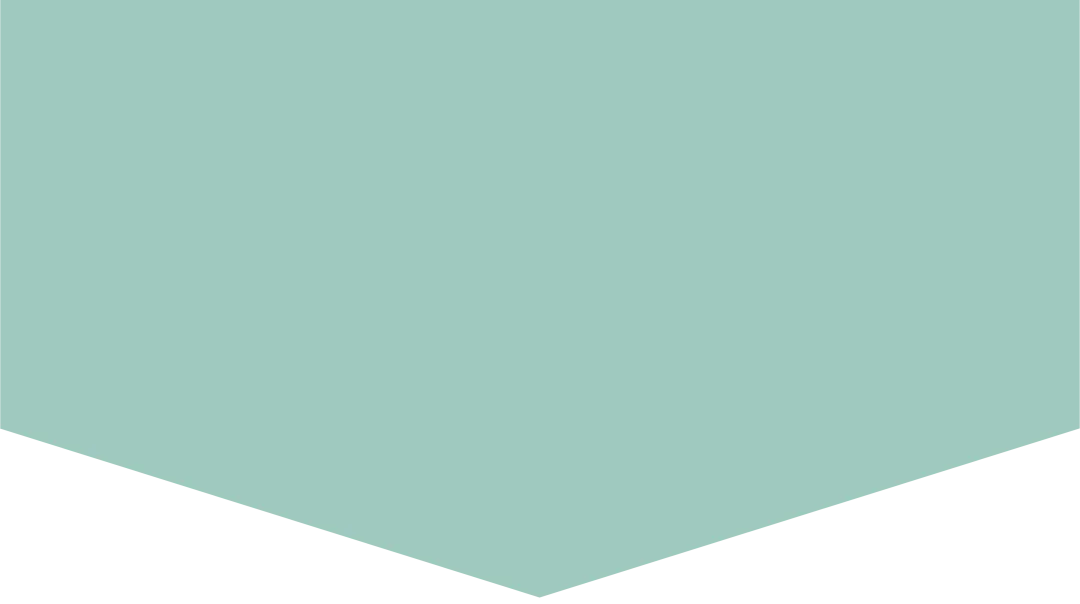
图1 GOMS的概念。
A 传统光学扳手,其通过高阶拉盖尔-高斯光束的轨道角动量分量诱导方位相位梯度光力。B 任意多边形形状的广义光学扳手,其形状由横向平面中的闭合轮廓定义。C GOMS的示意图,它结合了便携性与多任务驱动能力。通过使用三个圆偏振通道,它可以产生传播变化的广义光涡旋场,从而驱动颗粒进行多面体式运动。D 传播变化广义光涡旋的设计原理。每个光场图样Ψ由2N + 1个贝塞尔函数组成,在k空间中形成等间距梳状分布。光线追迹颜色编码表示局域相位,而不同传播距离下对应的模拟横向强度分布显示在下方。通过对这些分布进行精确加权,沿z方向的轴上强度分布遵循定制的强度F(z),从而实现从五边形到六边形的轮廓过渡。
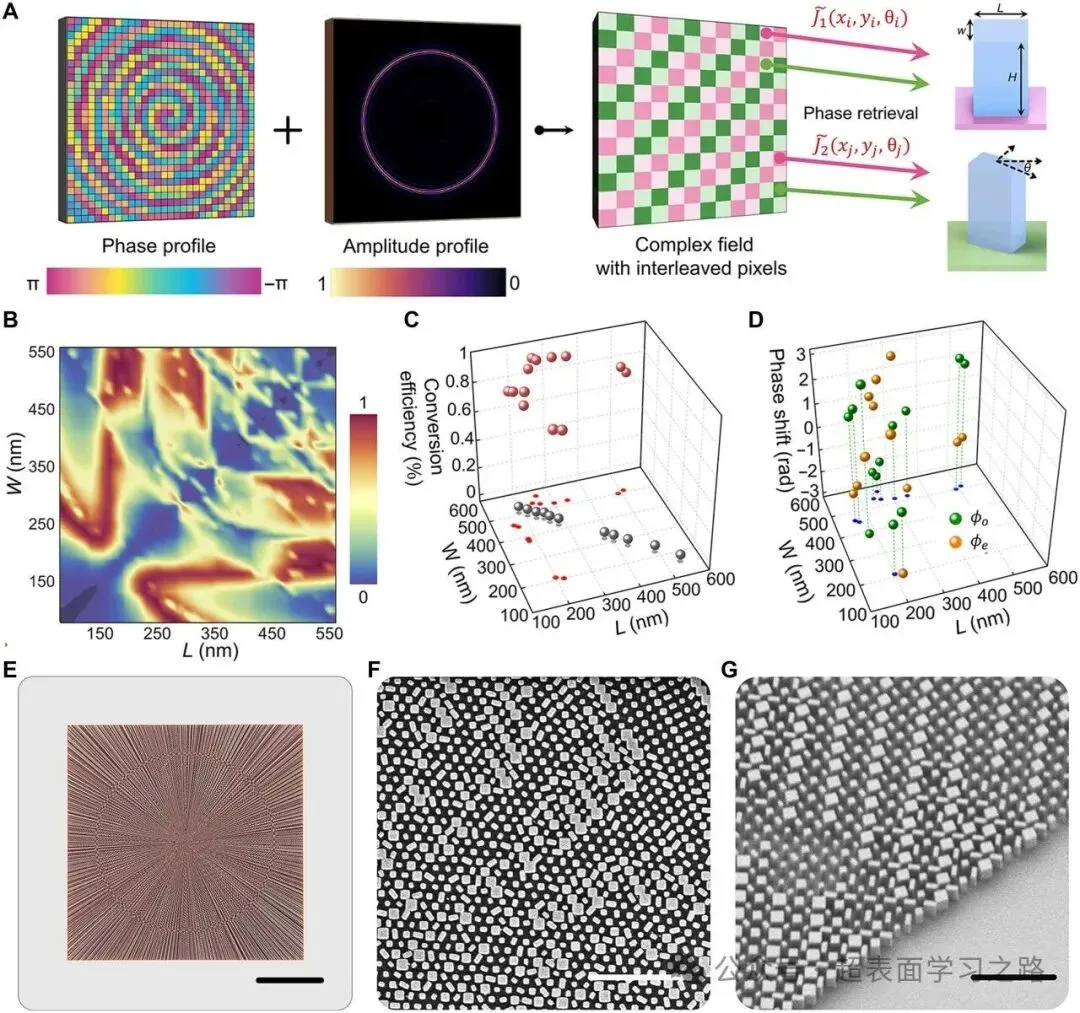
图2 多任务超表面的设计与制备。
A 流程图展示了超表面的编码过程:每个像素通过重新映射到笛卡尔矩阵中进行采样,随后通过振幅调制获得逐像素交织的复场。然后检索对应的纳米柱几何参数用于图案填充。通道J̃1和J̃2对应的纳米柱在空间上交错排列。B 所设计纳米柱的圆偏振转换效率仿真结果。C 选定纳米柱在交叉圆偏振通道(红色)和同圆偏振通道(灰色)下的测量转换效率。D 与C中数据对应的相位延迟ϕo和ϕe分布。E 制备超表面的光学显微图像;比例尺为250 μm。F 超表面的俯视扫描电子显微镜图像;比例尺为5 μm。G 超表面的侧视扫描电子显微镜图像;比例尺为5 μm。
图3 超表面传播变化广义光涡旋的表征。
A–C 分别是在三种不同圆偏振通道下,传播变化广义光涡旋从三角形到四边形、从五边形到六边形、以及从环形到七边形广义光涡旋演化的实验测量结果,并附有其在傅里叶空间中对应的理想相位与振幅分布。比例尺为10 μm。
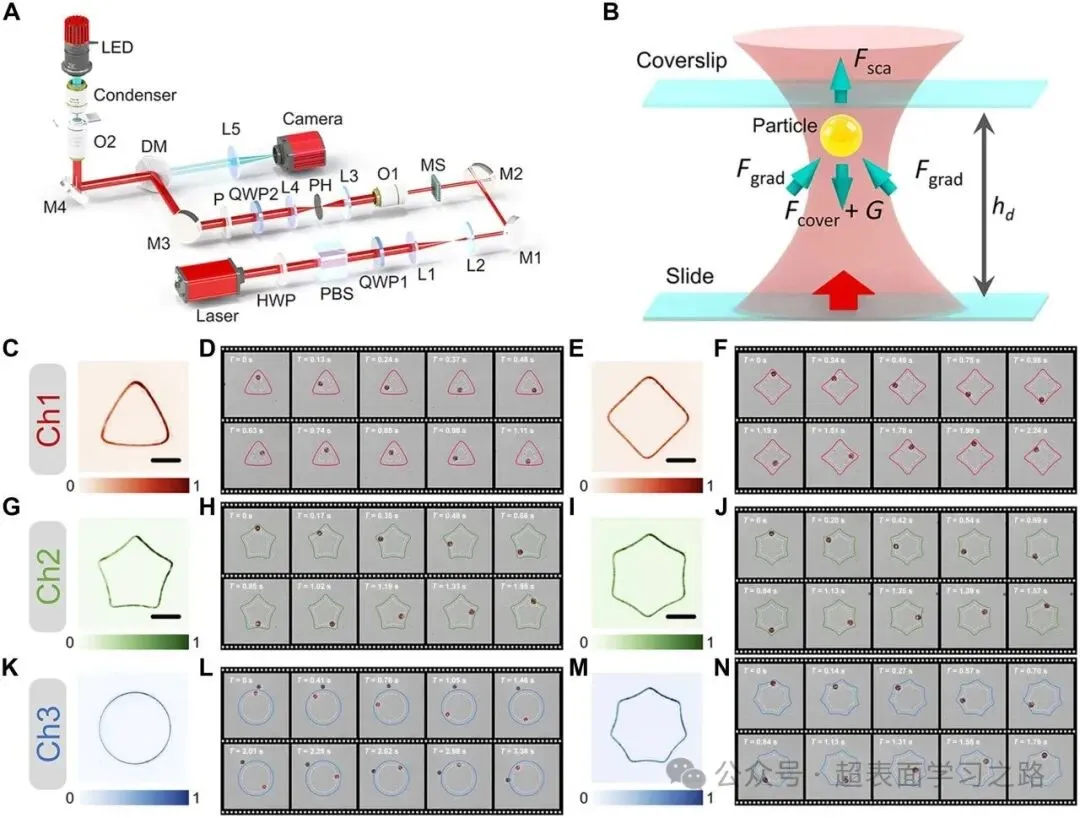
图4 微操控演示。
A 实验装置示意图。B 捕获腔室的细节示意图。C–N 金颗粒沿着广义光涡旋轨迹进行操控的时间序列显微图像,虚线箭头表示操控方向,伪彩色曲线表示目标广义光涡旋轮廓。比例尺为5 μm。
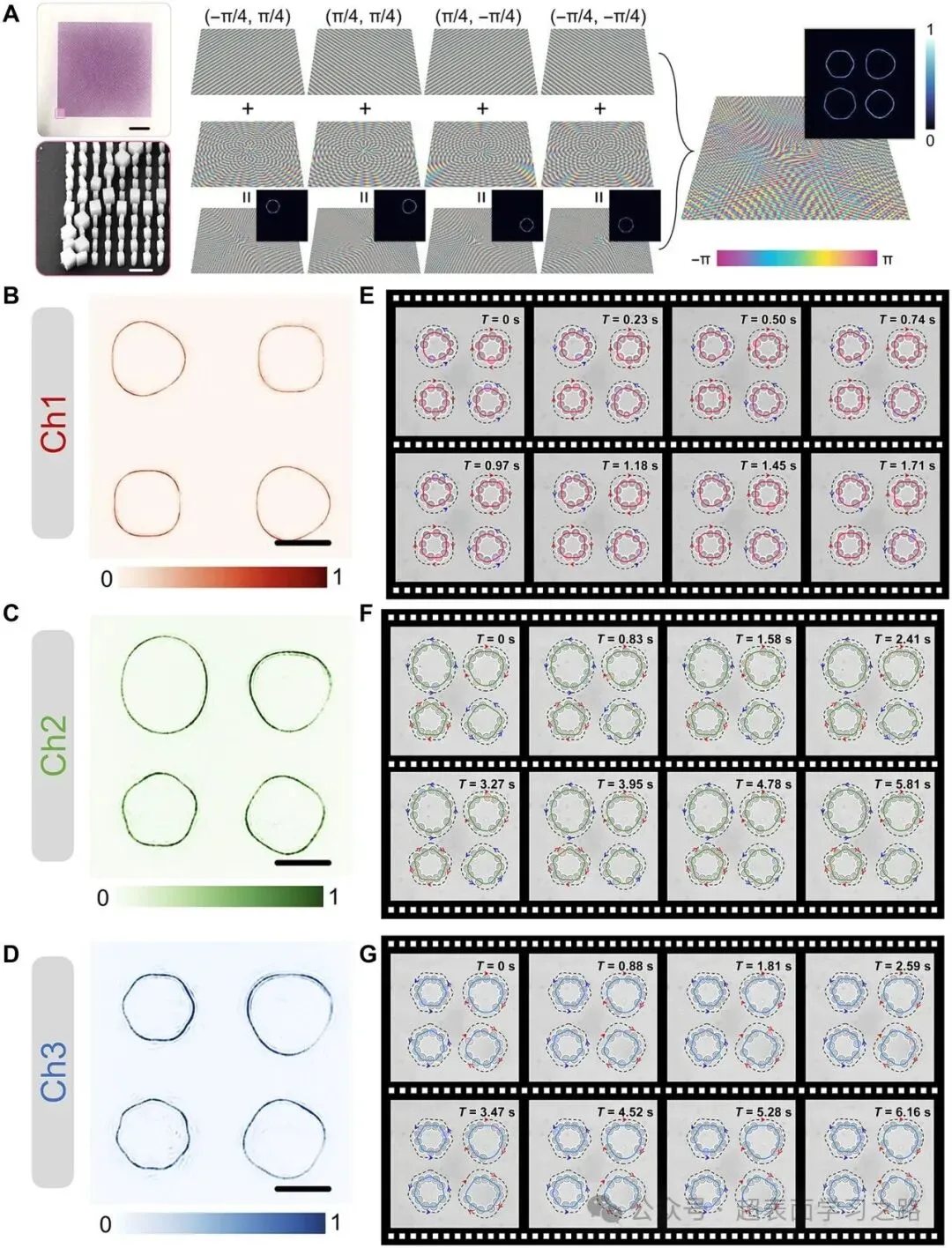
图5 基于超表面的广义光学扳手阵列。
A 样品表征、设计流程与广义光学扳手阵列的相位分布。左侧面板展示了具体的超表面样品,分别由光学显微图像(上)和扫描电子显微镜图像(下)给出。右侧面板展示了相位分布。每个相位分布都是通过分别计算四个方向上的相位梯度获得,再将这些梯度线性叠加,并将所得相位图与三通道超表面设计结合得到。B–D 与A中总相位对应的光场分布实验结果。E–G 利用超表面的三个通道对多组SiO2“项链”进行操控的时间序列成像。这些时间序列快照分别对应于B–D所示的同平面多任务广义光学扳手阵列。在每种情况下,左上和右下“项链”表现出逆时针旋转,而右上和左下“项链”表现出顺时针旋转。
参考文献
Tianyue Li et al.,Scalable generalized meta-spanners enabling parallel multitasking optical manipulation.Sci. Adv.12,eaed5302(2026).
DOI:https://doi.org/10.1126/sciadv.aed530
超表面学习之路
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 南京西路老公寓花园公寓三房带阳台
- 【高二世界】解析:江苏南京市新联盟校2025-2026学年高二下学期4月阶段检测地理试题
- 南京下一步要合并的县是哪?三选一,悬念太大了!
- 南京是一个巨大的lalaland…
- 40年代南京街头,太真实、太少见
- 五一江南【无锡南京】5.1晚-5.5 惠山古镇-寄畅园-网红拈花湾-寒山寺-同里-乌镇-南浔-秦淮河
- 【低空经济动态】南京:“十五五”末,低空经济(航空航天)产业规模超1000亿元
- 南京农业大学植物保护学院洪晓月/孙荆涛教授团队在TOP期刊发表科研成果:中国截形叶螨种群结构与靶标突变基因组分析研究
- 江苏南京市、盐城市2025-2026学年高三下学期第一次模拟考试地理题
- 倒计时第3天 | 4.15-17日南京国际博览中心,第三十三届生活用纸国际科技展览会5L32展位,佑盾与您相约!
