果蔬采摘机器人是农业机器人的重要组成部分,对提高果蔬生产效率意义重大,是农业机器人领域的研究热点。本文系统归纳了当前国内外果蔬采摘机器人技术现状,介绍了当前典型果蔬采摘机器人整机进展,并重点从采摘机器人关键机构和所涉及的核心技术两个维度进行了深入分析总结。
关键机构方面,阐述了视觉与行走机构技术进展与存在挑战,重点对末端执行器的抓取方式、采摘方式进行了分类介绍,对几种典型的末端执行器适用场景进行了梳理对比。
核心技术方面,全面总结了导航定位、目标识别以及机械臂轨迹规划等农业机器人核心技术现状,指出目前发展趋势,对比了不同技术的优势特点,并对当前卡点难题进行了分析,强调亟需构建农业专用感知-决策-控制一体化技术体系,以突破现有瓶颈。
最后,基于目前国内外研究现状,总结了采摘机器人研究还存在的技术难题,并对采摘机器人未来发展方向进行了展望。(鉴于篇幅有限,本推文主要介绍“果蔬采摘机器人整机技术现状”,原文还包括“果蔬类采摘机器人关键机构研究现状”、“农业专用感知-决策-控制一体化技术体系”和“果蔬采摘机器人关键技术研究现状”等详细内容。全文内容获取途径:本公众号后台回复“532”)
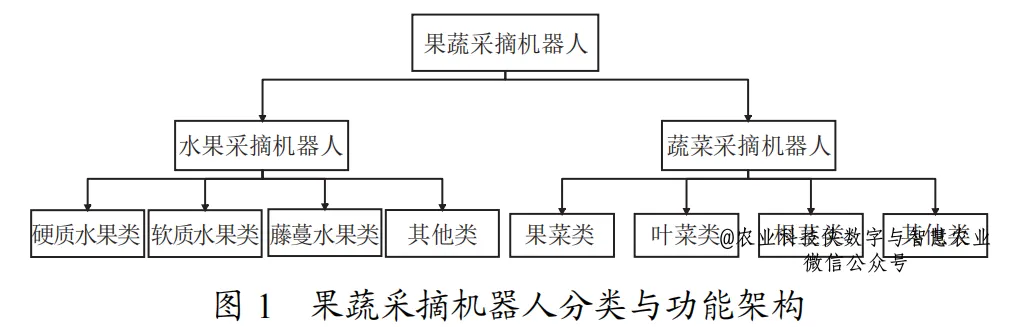
农业采摘机器人是农业机器人典型代表,用于选择性采收成熟农产品,其融合了成熟度检测、采摘点定位、机械臂控制、自动导航技术等,目的是为了在复杂的农业环境下高效、精准的完成采摘任务,降低人工成本,提高采摘效率。据国内外采摘机器人研究的主流分类形式,采摘机器人可按照作业对象大致分为水果类采摘机器人与蔬菜类采摘机器人两大类别。具体功能架构详见图1所示的分类体系。
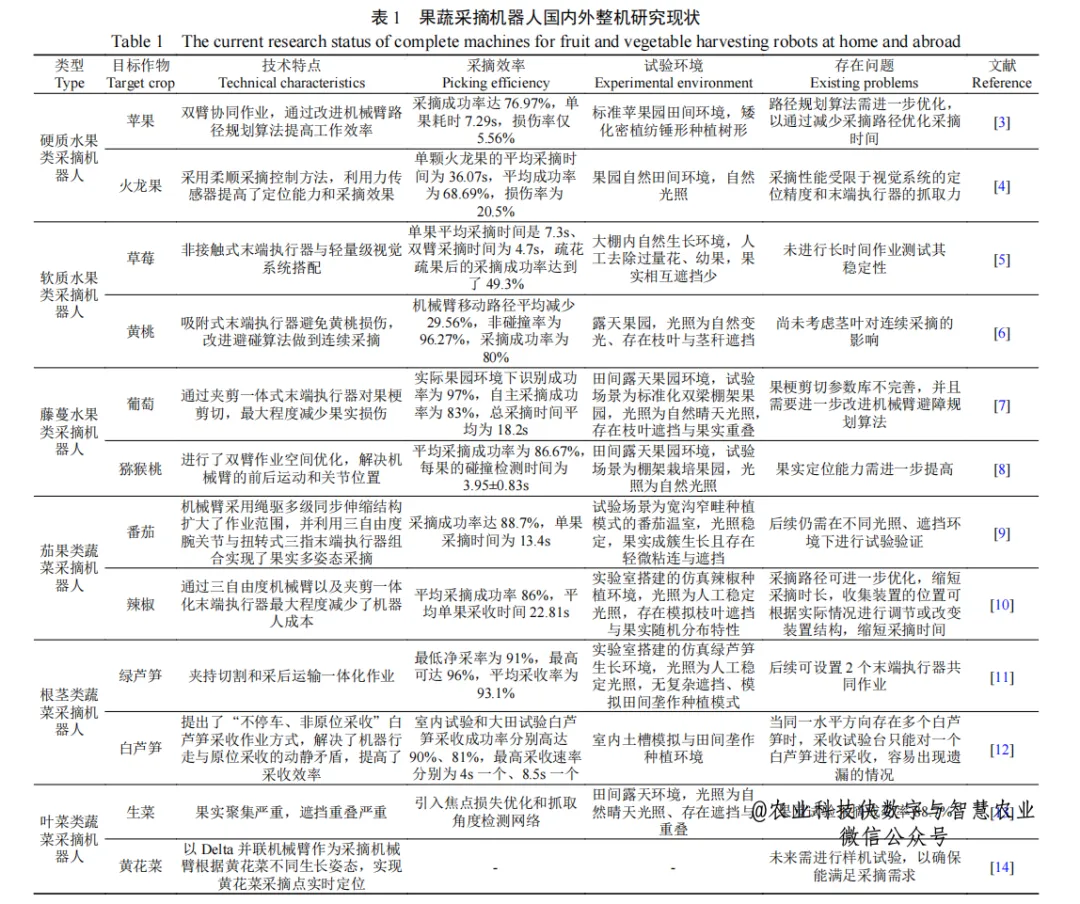
随着人工智能、机器视觉、软体机器人等技术的飞速发展,全球范围内的采摘机器人正从实验室原型机向商业化落地快速迈进。总体来看,国外研究起步早,技术积累深厚,商业化程度更高;而国内研究近年来发展迅猛,在国家政策的大力支持下,已在多个领域取得关键突破,应用前景广阔。表1概述了目前果蔬采摘机器人的国内外研究现状汇总。
2.1 典型水果采摘机器人
针对丘陵地带柑橘采收难、底盘作业倾角大等问题,鲍秀兰等[8]设计了一款适用于丘陵矮化栽培果园的柑橘采摘机器人,试验表明在低光照或正常光照条件下,平均果实定位准确率为82.5%,末端执行器夹取成功率为87.5%,平均单果采摘时间最短为12.3秒;高光照条件下平均果实定位准确率为72%,末端执行器夹取成功率为80%,平均单果采摘时间最短为12.5秒。董乃深等[7]设计了一种专用于大棚内垄作草莓的采摘机器人,其由双臂协作作业单元、高地隙移动底盘、双目视觉系统构成,试验结果表明,在果梗处无遮挡情况下采摘成功率达到 85.4%,存在部分遮挡时采摘成功率为75.5%,采摘单个草莓平均耗时为12.5s,损伤率为18.5%,采摘效果良好,满足大棚中垄作草莓采摘要求。崔永杰等[6]针对双臂间因采摘区域不连续造成的猕猴桃果实漏采问题,用理论与试验相结合的方法对双臂并行猕猴桃采摘平台进行设计,采摘试验结果表明,平均果实位置遍历成功率92.09%,验证了采摘空间的覆盖能力,平均果实采摘成功率为82.10%,平均单果采摘时间5.86秒,双臂仅在共享空间存在较低的碰撞风险,验证了双臂并行采摘平台的作业可行性。YIN等[4]解决人工采摘芒果劳动强度高、成本高的问题,开发了一种双机械臂芒果采摘机器人,通过田间芒果采摘实验评估了系统的性能。试验表明,采摘机器人的平均识别率和规划成功率分别为83.94%和98.45%。此外,该机器人的平均采摘成功率达到了73.92%,平均单果采摘时间为8.93秒,与单臂机器人相比,采摘时间减少了48.38%。
水果采摘机器人在设施化栽培等特定场景下已取得阶段性进展,视觉识别准确率与末端执行器抓取成功率在结构化环境中可达85%以上。然而,其采摘时果实损伤率普遍高于10%,单果采摘耗时为人工操作的2-5倍,且动态适应能力有限。当前研究重心已从单一功能实现转向复杂非结构化场景下的鲁棒性提升,需在多臂协同策略、柔性抓取力控及全周期作业稳定性等方面实现系统性突破。
2.2 典型蔬菜采摘机器人
于丰华等[12]设计了一种日光温室的番茄采摘机器人,如图1c所示,使用了麦克纳姆轮全向移动平台作为机器人的移动底盘。通过试验表明采摘成功率达85%,单果采摘时间为13.4秒。针对黄瓜人工采摘效率低、损伤率高的问题,康俊杰等[15]设计了一款具有六自由度机械臂的轻量化黄瓜采摘机器人,通过气力驱动的末端执行器和改进的轻量化深度学习神经网络算法,使采摘成功率达到80%,平均采摘耗时9.1秒。但目前仍存在枝叶严重遮挡、果实高度重叠下识别效果差与气压稳定性波动的问题。SEPÚLVEDA等[9]针对茄子采摘自动化难题,设计了一种双臂茄子采摘机器人,结果表明,该机器人采摘成功率达到91.67%,平均单果采摘时间为26秒。ARAD等[16]针对温室环境下设计了一款甜椒采摘机器人,试验表明,平均单果采摘时间为15秒,在最佳作物条件下,采摘成功率达到了61%。RONG等[13]设计了一种樱桃番茄选择性采摘机器人,该机器人由凸轮机构驱动末端执行器,实现剪切与抓取异步动作;采用改进级联视觉模型来定位果梗位置,并结合了点云处理来计算末端执行器的接近姿态。田间实验表明,在无遮挡位置采摘点定位成功率达86.1%,采收成功率为56.6%,单簇平均采收周期24秒,为番茄无人采摘提供了解决方案。
蔬菜采摘机器人因作物形态多样性更高、枝叶遮挡更密集、采收标准更复杂,面临的技术挑战较水果类更为突出。尽管设施环境下的茄果类采摘已具备初步演示能力,但叶菜类的密集重叠采收、根茎类的地下定位等问题尚处探索阶段。未来研究需同步推进设施农业的精细化作业能力与大田环境的广适应性,而非简单的场景迁移,核心难点在于动态环境感知与柔性操作的深度耦合。
在整机技术持续迭代与政策驱动下,果蔬采摘机器人已从实验室原型机逐步迈向规模化商业落地,国内外形成“国外技术领跑、国内政策赋能”的差异化产业化格局。
3.1 国外产业化现状
全球果蔬采摘机器人产业化始于技术积累与市场需求的双重驱动,已形成由核心企业主导、覆盖细分场景的商业化体系。商业化模式以服务租赁为主,企业通过按采摘量或作业面积收费,降低大型集约化农场的前期投入门槛,其产品设计普遍追求高通量作业能力。
美国Advanced Farm Technologies公司针对草莓与苹果采收推出的T-6型机器人,采用了轮式底盘与多并联机械臂的构型。该机器人集成了基于颜色阈值分割与深度学习的视觉系统,以实现全天候环境下的果实识别,并配备柔性抓手以降低浆果损伤。商业化应用数据显示,其在加利福尼亚州等地的垄作草莓园中,单机作业效率可达人工的5倍以上。以色列FFRobotics公司则面向高密度矮化果园,开发了门架式多臂采摘平台。该平台两侧可配置多达12个三指机械手,通过计算机视觉与线性驱动机构协同,标称采摘速度最高可达每小时10000个果实,旨在解决大规模果园的劳动力短缺问题。同为以色列企业的MetoMotion公司,专注于温室番茄采摘,其“GRoW”系统集成了3D视觉定位、无损剪切夹持器及自主导航与装箱功能。据称,该系统可实现夜间连续作业,并能将温室番茄采摘的劳动力成本降低约50%。国外果蔬采摘机器人的产业化呈现出市场主导、技术驱动、模式成熟的特征。其发展紧密依托大型集约化农场的需求,形成了以高通量、高可靠性为核心的技术路线,并通过灵活的租赁商业模式降低了应用门槛,在草莓、苹果、柑橘及温室番茄等标准化程度较高的场景中已实现规模化商业应用。
3.2 国内产业化现状
国内果蔬采摘机器人的产业化进程初期以科研院校的成果转化为主要路径。近年来,在智慧农业政策引导下,一批创新型企业涌现,推动产品从实验示范向田间应用转型,并呈现出针对本国农艺环境进行小型化、低成本化适配的特点。
苏州博田自动化技术有限公司依托高校研发力量,推出了适用于高架种植模式的草莓采摘机器人。该机器人采用跨垄式自主导航底盘,集成双目视觉与声纳避障系统,能够完成成熟度判断、果柄定位与无损剪切。示范应用显示,其对草莓的识别成功率超过90%,部分型号还集成了夜间紫外诱捕等辅助功能,以提升设备综合利用率。上海点甜网络科技有限公司致力于开发基于5G通讯与边缘计算的协同作业系统。其AI智能采摘机器人通过云端大数据进行实时路径规划,虽单机绝对效率较国际顶尖水平存在差距,但凭借较高的成本效益和对国内复杂种植环境的适应性,已在长三角地区的叶菜与茄果类蔬菜采摘中开展应用试验。中科原动力是国内农业机器人领域的代表性企业,在采摘机器人方面的探索主要聚焦于设施农业高价值作物,其技术路线和产品性能在国内处于前沿水平,智农番茄采摘机器人专为商业温室环境设计,致力于解决人工在高温高湿环境中作业的难题,机器人可适配不同末端执行器,适应“单果粒收”和“成串采收”等多种农艺要求,采用多任务深度学习算法,对番茄串的识别、成熟度判断和姿态检测准确率均超过95%。手眼协同定位精度达毫米级,独创了“变径负压吸附”式和“环形勺舀”式末端执行器,在结构上能容忍一定系统误差,保障成功率。
综上所述,国内果蔬采摘机器人的发展路径具有鲜明的政策引导与需求适配双重属性。现阶段,产业正从科研示范向商业化初期过渡,技术研发重点在于应对复杂多样的本土农艺条件,并通过集成创新探索小型化、低成本、高附加值的解决方案。未来,提升核心部件的可靠性、突破动态非结构化环境下的作业瓶颈、并建立可持续的商业模式,是国内产业迈向成熟的关键。
农业科技侠交流群
入群可添加小编微信(扫描下方二维码,备注:来意-姓名-单位,若二维码添加失败,请公众号后台私信留言“入群”)
投稿、宣传推广、开白等请在本公众号后台回复“1”
转载请注明来源:本文转自农业科技侠数字与智慧农业微信公众号
编辑:李丽
来源:农业工程学报
声明:本文旨在前沿分享,若有编辑等问题,敬请后台留言


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
