南京林业大学邵伟·ACS AMI·水凝胶·梯度结构·光热驱动·磁响应·软体机器人
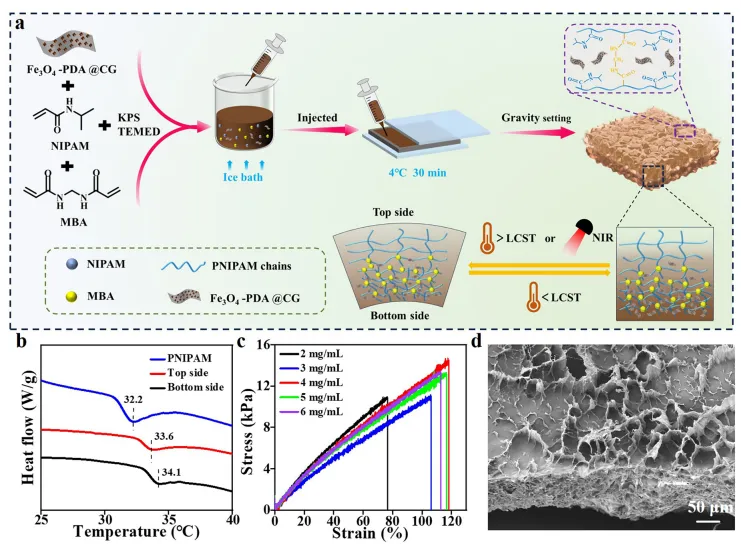
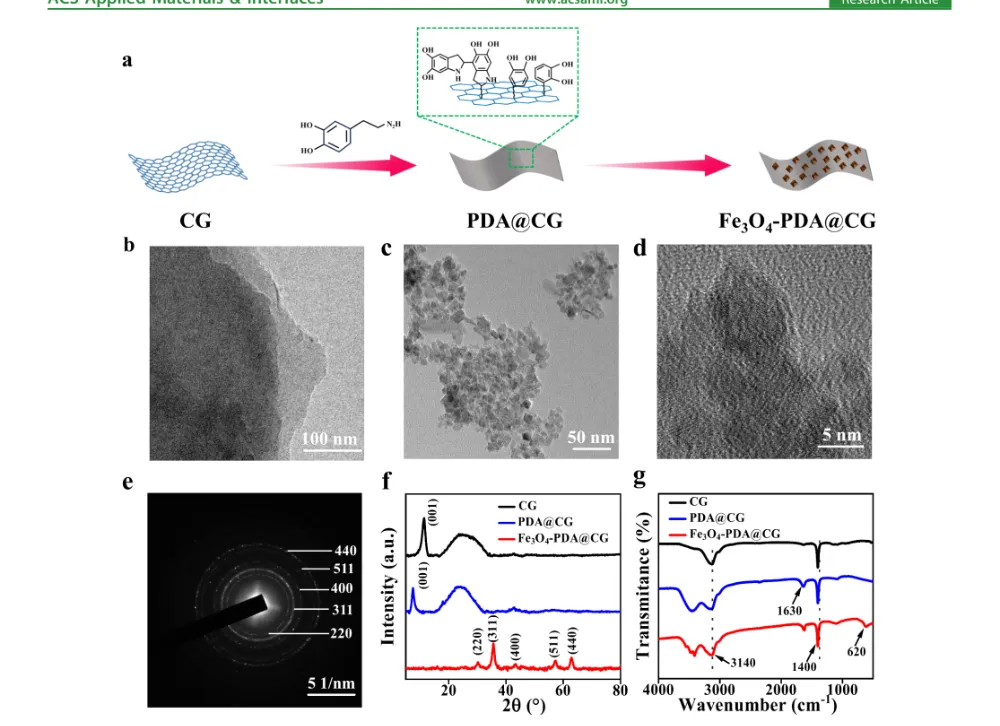
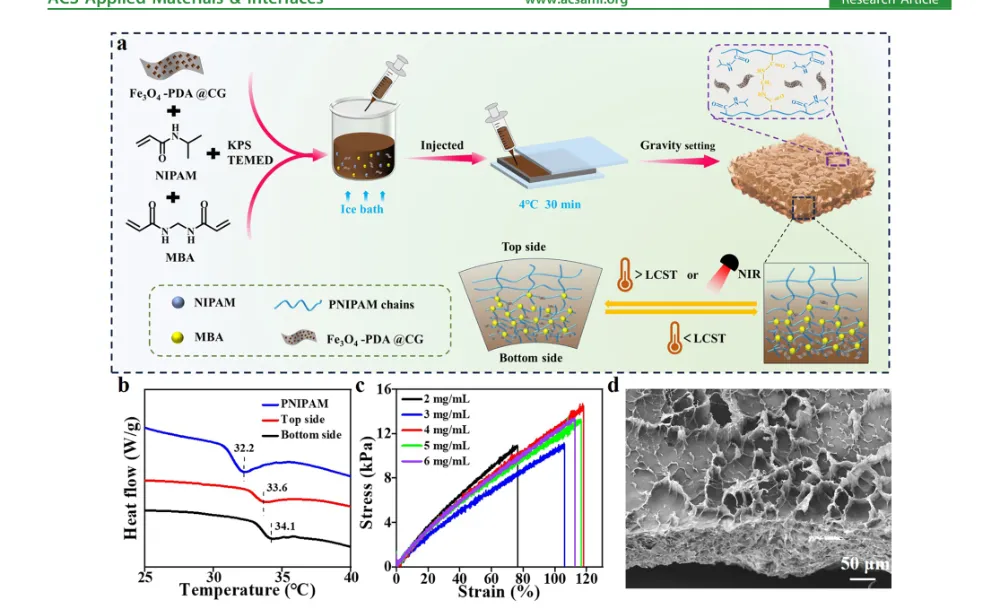
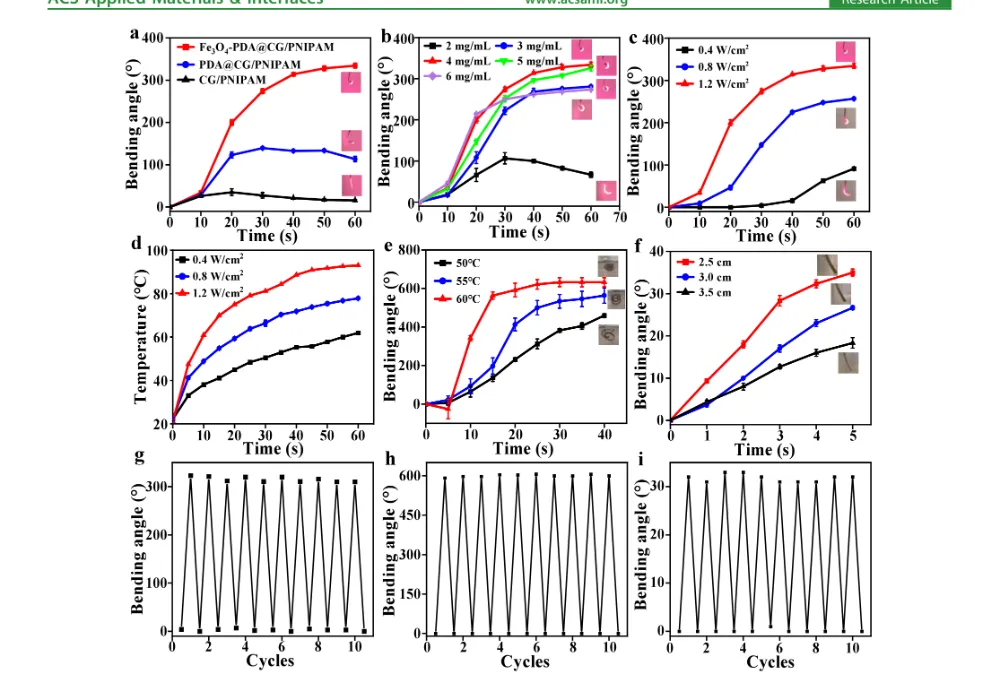
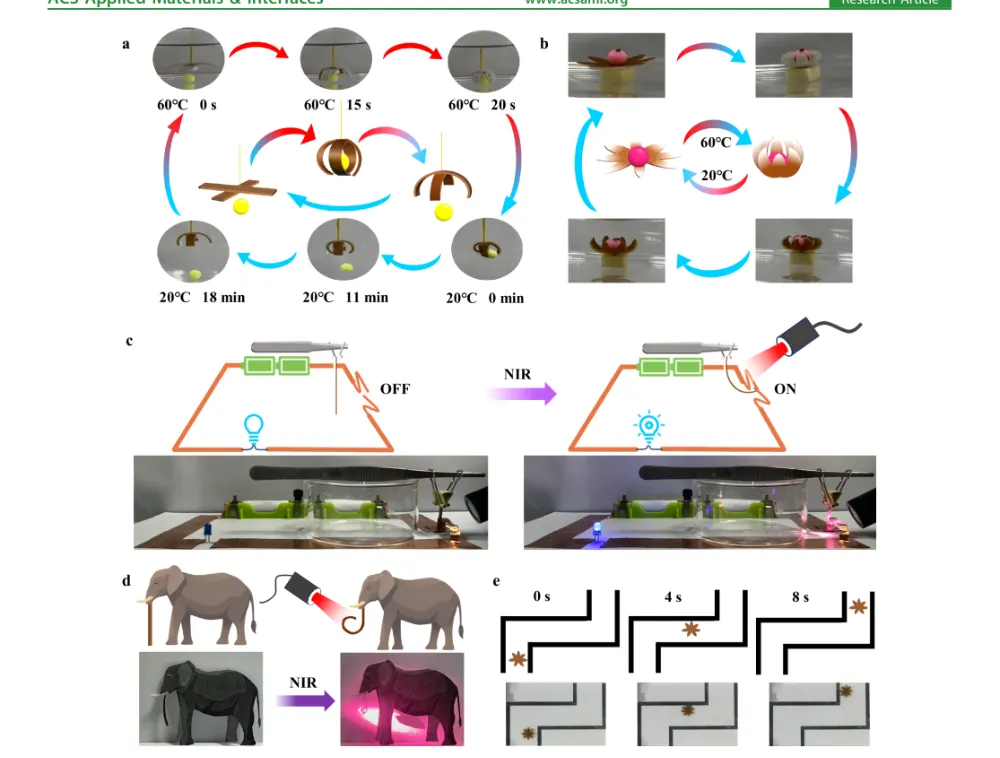
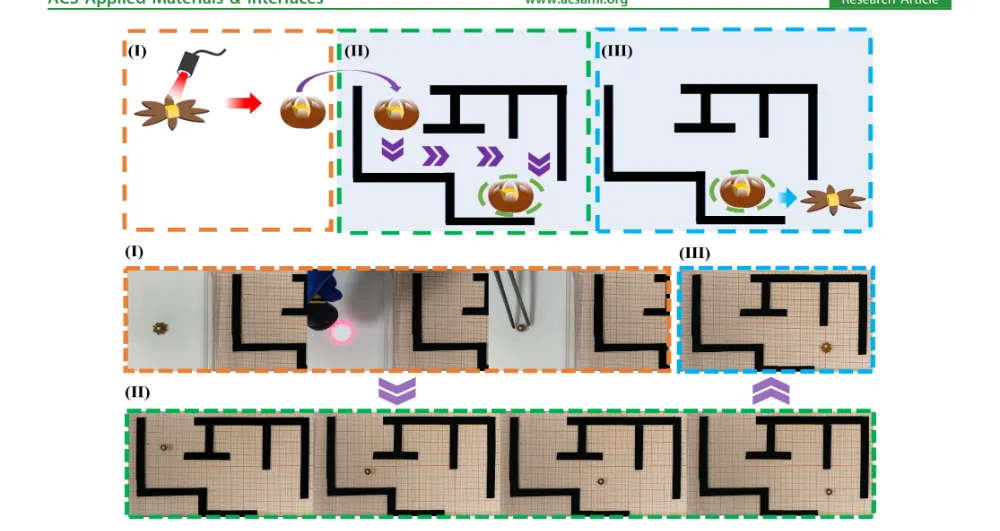
三重响应梯度结构磁性多巴胺功能化羧基石墨烯水凝胶用于智能驱动与仿生应用为了解决传统刺激响应水凝胶驱动器响应速度慢、驱动模式单一以及结构稳定性不足等关键科学问题,南京林业大学Wei Shao团队提出了一种基于梯度结构设计的三重响应水凝胶驱动体系。该研究通过将具有优异光热转换能力和磁响应能力的Fe3O4−PDA@CG纳米片引入PNIPAM温敏水凝胶体系中,并利用重力诱导沉积构建梯度分布结构,实现了对近红外光、温度和磁场的三重刺激响应驱动。具体而言,该团队采用原位聚合策略与重力沉降协同构筑方法,将Fe3O4−PDA@CG纳米片均匀分散于NIPAM单体体系并形成梯度分布结构,成功制备出具有各向异性结构的Fe3O4−PDA@CG/PNIPAM水凝胶驱动器。该材料表现出优异的驱动性能,如快速弯曲响应、高弯曲角度及优异循环稳定性;其性能主要归因于梯度结构带来的热响应不对称性以及PDA与羧基石墨烯协同增强的光热转换效率,同时Fe3O4纳米颗粒提供磁响应驱动能力。由于上述结构与性能优势,该水凝胶驱动器能够在软体机器人抓取、仿生驱动器、光控电路开关以及非接触式物体运输等领域展现出良好的应用潜力。本研究为多刺激响应水凝胶驱动器的设计提供了一种新的结构策略,并为智能软体材料在复杂环境中的应用奠定了重要基础。相关论文以“Magnetic Polydopamine-Functionalized Carboxylated Graphene Nanosheets-Enabled Gradient Hydrogel: Triple-Responsive Actuation for Smart Robotics and Bioinspired Applications”为题,发表在ACS Appl. Mater. Interfaces上。刺激响应水凝胶因其良好的柔性、生物相容性以及对外界刺激的敏感响应,在软体机器人、智能器件及生物医学领域具有广泛应用潜力。然而,传统水凝胶驱动器通常存在响应速度慢、驱动效率低以及驱动方式单一等问题,限制了其在复杂环境中的应用。目前常见的双层结构水凝胶驱动器依赖于不同材料层之间的体积变化差异实现弯曲变形,但该结构容易产生界面脱层问题,同时结构稳定性和循环可靠性有限。此外,单一刺激响应水凝胶难以满足复杂环境中的多功能驱动需求。为克服上述问题,本研究通过引入具有光热转换能力与磁响应能力的Fe3O4−PDA@CG纳米片,并利用重力诱导沉积构建梯度结构,实现水凝胶内部功能组分的空间分布差异,从而实现多刺激响应驱动。如何通过结构设计与多功能纳米填料协同作用,实现具有快速响应、高驱动效率以及多刺激响应能力的水凝胶驱动器,是本研究关注的核心科学问题。图1 中文图注:(a)Fe3O4−PDA@CG纳米片的制备过程。(b)PDA@CG 的 TEM 图像。(c)Fe3O4−PDA@CG 的 TEM 图像。(d)Fe3O4−PDA@CG 纳米片的 HRTEM 图像。(e)Fe3O4−PDA@CG 纳米片的 SAED 图谱。(f)CG、PDA@CG 和 Fe3O4−PDA@CG 的 XRD 图谱。(g)CG、PDA@CG 和 Fe3O4−PDA@CG 的 FT-IR 光谱。图2 中文图注:(a)Fe3O4−PDA@CG/PNIPAM 水凝胶的制备流程图。(b)Fe3O4−PDA@CG/PNIPAM 水凝胶两侧与 PNIPAM 水凝胶的 DSC 曲线。(c)不同 Fe3O4−PDA@CG 纳米片浓度的 Fe3O4−PDA@CG/PNIPAM 水凝胶力学性能。(d)Fe3O4−PDA@CG/PNIPAM 水凝胶截面的 SEM 图像。图3 中文图注:(a)CG/PNIPAM、PDA@CG/PNIPAM 和 Fe3O4−PDA@CG/PNIPAM 水凝胶的弯曲角变化;(b)纳米片浓度对在 808 nm NIR 光(1.2 W/cm²)照射下水凝胶弯曲角的影响。(c)含 4 mg/mL Fe3O4−PDA@CG 的水凝胶在不同功率下的弯曲角变化;(d)含 4 mg/mL Fe3O4−PDA@CG 的水凝胶在不同功率下的温度变化。(e)温度对 Fe3O4−PDA@CG/PNIPAM 弯曲角的影响;(f)磁体距离对 Fe3O4−PDA@CG/PNIPAM 弯曲角的影响。(g)在交替 NIR 照射(808 nm)与 20 ℃ 水浸泡条件下的循环弯曲—恢复行为;(h)在依次暴露于 60 ℃/20 ℃ 水条件下的热响应行为;(i)磁场加载/卸载驱动行为。图4 中文图注:水凝胶驱动器应用展示:(a)四臂抓手可在 60 ℃ 和 20 ℃ 水中抓取并释放球形模型。(b)水凝胶花的温度响应开合行为。(c)模拟象鼻弯曲运动的仿生弯曲行为。(d)通过驱动器接触/断开触发的 NIR 光控电路开关(NIR:808 nm,1.2 W/cm²)。(e)水凝胶花在磁场控制下通过两个 90° 转弯。图5 中文图注:水凝胶驱动器实现物体承载非接触运输装置的三个阶段:(I)承载,(II)运输,以及(III)释放。提出了一种梯度结构三重响应水凝胶驱动器,通过重力诱导沉积实现Fe3O4−PDA@CG纳米片在水凝胶内部的梯度分布,从而构建具有结构各向异性的单层水凝胶驱动体系。创新性地将羧基石墨烯、聚多巴胺以及Fe3O4磁性纳米颗粒进行协同组装,形成具有光热转换与磁响应功能的复合纳米填料,实现多功能驱动机制的集成。提出了基于梯度结构的热响应差异驱动机制,使水凝胶在近红外光或温度刺激下产生明显弯曲变形,实现快速驱动响应。材料原料:羧基化石墨烯、N‑异丙基丙烯酰胺、FeSO4·7H2O、NH4Fe(SO4)2·12H2O、多巴胺盐酸盐、N,N′‑亚甲基双丙烯酰胺等。合成策略:采用表面功能化与原位聚合相结合的方法,通过多巴胺包覆羧基石墨烯并原位生长Fe3O4纳米颗粒得到Fe3O4−PDA@CG纳米片,然后通过原位自由基聚合制备Fe3O4−PDA@CG/PNIPAM梯度水凝胶。合成机理关键词:梯度沉积·原位聚合·纳米复合·光热转换·磁响应。材料性能优势:快速驱动响应·高弯曲角度·优异循环稳定性·多刺激响应驱动。应用领域简写:软体机器人(SR)·智能驱动器(Actuator)·仿生器件(Bio-inspired devices)。该梯度水凝胶驱动器在近红外光、温度以及磁场刺激下均可产生快速弯曲响应,在近红外照射下可实现超过300°的弯曲角度,表现出优异的驱动能力。Fe3O4−PDA@CG纳米片具有优异的光热转换能力,在近红外光照射下可快速将光能转化为热能,从而触发PNIPAM的体积相变。梯度结构使纳米片在水凝胶内部形成非均匀分布,导致上下层热响应差异,从而产生弯曲驱动力。PNIPAM在超过LCST温度时发生疏水收缩,使水凝胶网络快速脱水并产生体积收缩。多巴胺与羧基石墨烯之间形成稳定界面结构,同时Fe3O4纳米颗粒赋予材料磁响应能力,实现多刺激驱动机制。该水凝胶同时具有温度响应、光响应以及磁响应特性,并具备良好的机械稳定性和可重复驱动能力。软体机器人抓取装置、仿生驱动器、光控电路开关以及非接触式运输系统等。水凝胶在近红外光照射下可实现快速弯曲响应,并在温度变化和磁场作用下实现可控驱动。研究成果的核心贡献:该研究提出了一种基于梯度结构设计的三重响应水凝胶驱动策略,实现了快速、高效且稳定的多刺激驱动。科学或工程意义:该策略为多功能水凝胶驱动器的设计提供了新的思路,并推动了智能软体材料的发展。潜在拓展应用领域:该材料体系在软体机器人、生物医学器件以及智能运输系统等领域具有广阔应用前景。性能:快速响应·高弯曲角度·循环稳定性·多刺激驱动期刊:ACS Applied Materials & InterfacesDOI: 10.1021/acsami.5c23682本公众号发布的内容(包括但不限于文字、图片、视频、音频及设计素材等),如有侵权,请联系删除。我们始终尊重知识产权,严格遵守《中华人民共和国著作权法》等相关法律法规,致力于维护健康的内容创作环境。欢迎大家投稿,联系邮箱:Gel_hub@163.com