尽管离子凝胶突触器件的合成和应用取得了显著进展,但仍面临以下挑战:
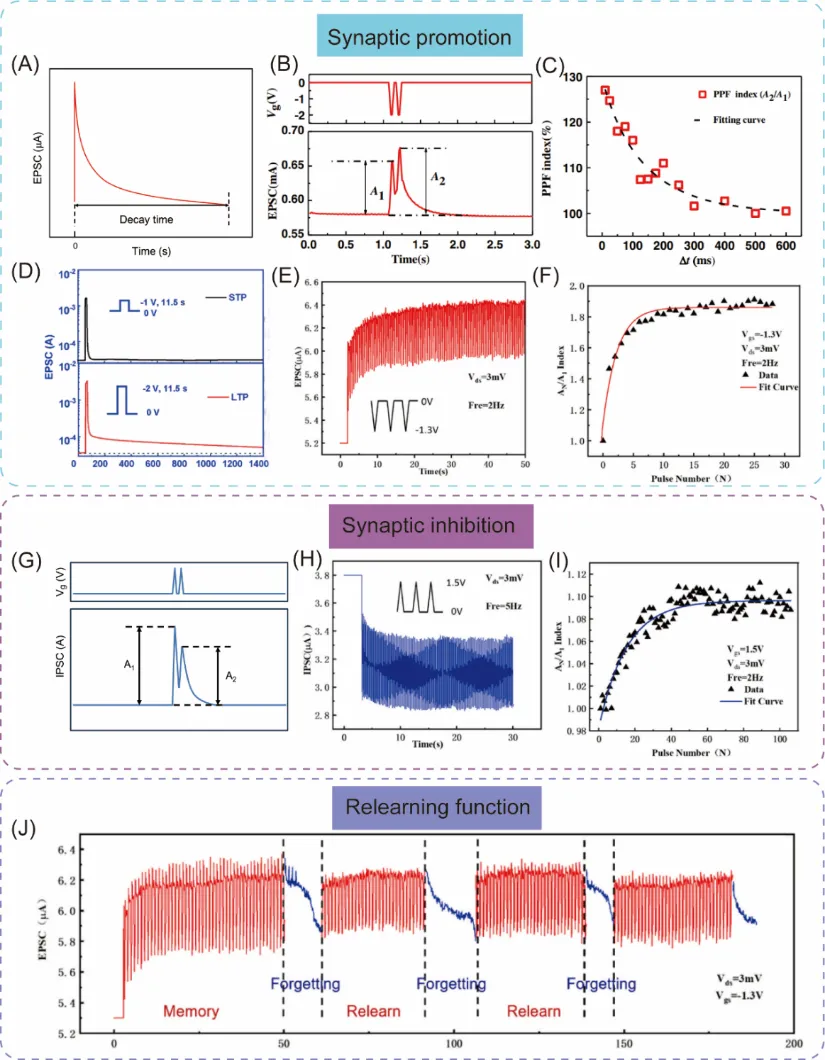
多功能性:大多数IGS 依赖有机半导体通道和离子凝胶介电层,难以同时实现兴奋性和抑制性突触行为。目前的神经形态研究多局限于少数神经元或突触器件,功能较为基础。未来研究需探索多输入 IGS 和多栅极突触权重调制,以满足多样化需求,并为人工智能和软体机器人提供支持。
稳定性:离子凝胶的吸湿性会影响其在潮湿环境中的性能,限制应用场景。研究新的封装技术是提高稳定性的可行方法。此外,金属电极的腐蚀和半导体通道的掺杂会导致性能下降,需开发新材料和调整工艺来抑制退化。机械稳定性方面,可考虑结构和材料工程的创新。
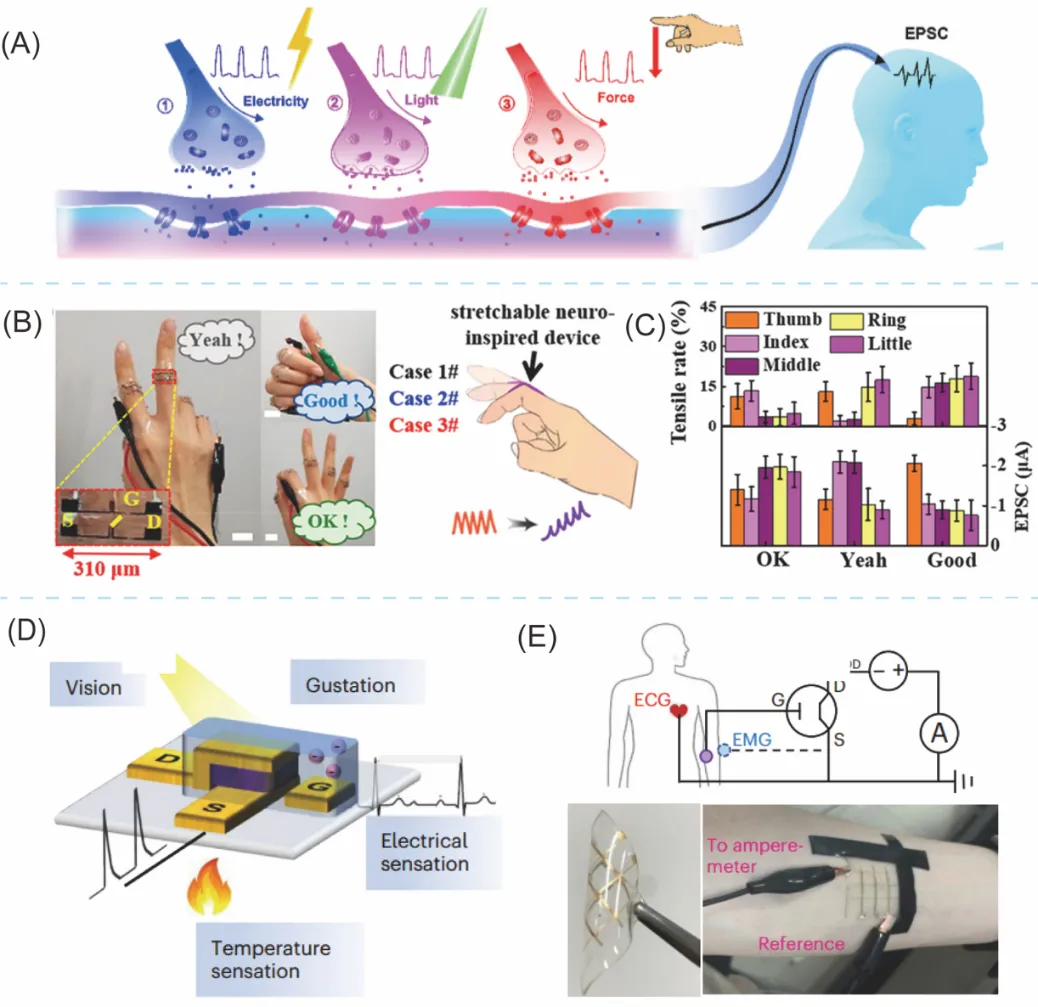
生物相容性:用于可穿戴设备的IGS 必须对人体无害。然而,离子凝胶的制备常需有害有机溶剂,不利于未来生物电子学应用。需开发新工艺减少有害物质,并研究新型生物相容性离子液体和聚合物。同时,确保人体对柔性 IGS 的附着和舒适性。
能耗:与能耗较高的冯・诺依曼架构相比,生物计算系统能耗极低。IGS 的功耗虽低于传统晶体管,但仍需进一步降低工作电流和功耗以达到生物水平。结合能量收集机制和复杂学习任务,IGS 有望成为未来人工智能和计算领域的重要技术。
总结来看,基于柔性IGS 的神经形态系统仍处于实验开发早期,制造和集成挑战较大。实现柔性阵列级 IGS 系统是研究前沿,需积累更多理论和实践知识以推动商业化。