南京师范大学付晓教授 |《测绘学报》专栏:面向长距离通勤场景的城市垂直起降场布局优化方法
- 2026-07-19 20:16:40

“空间智能与智慧城市”专栏:
专栏召集人:涂伟,深圳大学
客座编辑:刘康,中国科学院深圳先进技术研究院;杨雪,中国地质大学(武汉)
1.冉耘博,杨雪,周文豪,等.多维偏好增强型对抗深度强化学习驱动的行人路径规划
3.王少华,梁浩健,苏澄,等.耦合时空大数据和人工智能的城市设施配置优化研究进展与展望
4.付晓,朱司蕊,厉旭东,等.面向长距离通勤场景的城市垂直起降场布局优化方法
5.郭军豪,吴明治,王培晓,等.一种面向定点稀疏轨迹的密度聚类停留点识别方法
付晓 1,2,3, 朱司蕊1,2,3, 厉旭东4, 闾国年1,2,3
1.
2.
3.
4.
摘要
城市空中交通为居民出行提供了新兴的交通选择,垂直起降场等关键基础设施的选址与空间布局将直接影响未来城市居民的出行模式与行为特征。聚焦城市居民的长距离通勤场景,本文基于真实的通勤需求数据,分析了垂直起降场的合理布局。本文构建了一个双层规划模型,模拟垂直起降场的选址与居民出行选择之间的互动机制,旨在寻求能够最小化通勤者单程通勤时间、提升高峰期地面通勤关键道路运行效率的选址方案。在上层,将站点选址构建为一个多目标优化模型,以候选站点的组合为决策变量,采用多目标遗传算法求解;在下层,通过多智能体交通仿真模拟典型通勤者的活动-出行链,评估布局方案对通勤效率的综合影响。以南京市长距离通勤场景为案例,试验结果表明,本文方法能有效提升长距离通勤效率,使整体通勤时间缩短约5%。本文为未来城市多模式交通的规划与管理提供了理论依据与支持。
关键词
基金项目
作者简介
作者简介
本文引用格式
本文引用格式
付晓, 朱司蕊, 厉旭东, 闾国年.
FU Xiao, ZHU Sirui, LI Xudong, LÜ Guonian.
阅读全文
阅读全文
http://xb.chinasmp.com/article/2026/1001-1595/1001-1595-2026-02-0236.shtml
城市的持续扩张加剧了职住分离现象,居住区与就业区的空间距离逐渐增加。这一趋势带来了更多长距离通勤需求,使城市道路在工作日表现出规律而集中的拥堵特征[1]。当前,城市多模式交通网络呈现无所不在、无处不达、动态发展的态势。传统地面交通方式在高峰时段常常面临过载压力,不仅导致通勤耗费大量时间,也造成了环境污染与能源消耗问题[2]。城市空中交通(urban air mobility,UAM)作为一种新型出行方式逐渐受到关注,它主要依托电动垂直起降飞行器为乘客提供快速灵活的运输服务[3]。这一交通方式增加了垂直维度的交通供应,提升了运输效率,能够实现更快的城内和城际连接[4-5]。现阶段,UAM的建设致力于与地面交通系统紧密结合,实现空地一体化的高效智能交通体系[6-7]。垂直起降场作为飞行器起降、停放和充电的地面基础设施,被视为UAM空中系统与地面系统的出入口节点,其规划与设计的合理性直接影响UAM系统的运行效能。
凭借快速直达、点对点连接及避开地面拥堵的优势,UAM能在高需求通勤走廊中分担部分流量,缓解职住分离带来的长距离通勤难题。在道路拥堵时段,UAM具有显著的出行模式转移潜力[8],据估计可为全球多个城市节省3%~13%的机动出行时间[9]。然而,尽管UAM能分担部分地面交通压力,它对路网性能的改善十分有限[10]。加之站点与起讫点之间接驳需求可能增加道路车辆行驶里程,UAM更适用于紧急运输或偏远地区连接等特定场景[11]。在影响UAM系统运行的要素中,垂直起降机场的布局尤为关键,其位置选择比数量更加重要[12]。现有研究基于人口密度、交通流、土地利用和社会经济特征等多维数据,通过分析出行需求、交通拥堵状况与服务覆盖范围,优化垂直起降机场的选址、容量与吞吐量[13-14]。这些研究多聚焦交通系统整体效益,如飞行效率或运营收益等,尚未揭示UAM对个体出行的影响。
个体的活动-出行规律探究是城市交通规划及管理的重要基础[15-16]。对活动-出行链的识别与分析不仅有助于预测交通需求、优化交通系统结构,还能为出行管理及相关政策制定提供依据[17]。基于活动-出行链对个体日常出行链进行建模能够揭示出行行为的生成机制及其时空分异特征[18],这一方法在提升交通需求预测精度的同时,也为评估UAM等出行方式的潜在影响提供了有效手段。图1展示了基于UAM的长距离通勤出行示意。多智能体仿真作为交通行为建模的重要工具,可以用于构建包含按需UAM服务的城市交通仿真框架。其核心优势在于采用“自下而上”的建模思路,反映个体行为的异质性,并展现由个体间复杂交互作用所引发的宏观交通现象[19]。通过模拟不同个体在动态交通环境中的出行决策,可以真实地体现决策过程的动态特征,并评估其对交通系统的整体影响[20]。
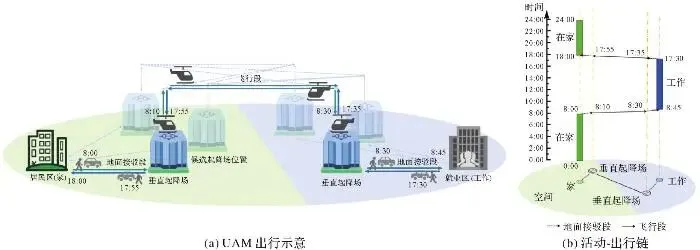
图1 UAM长距离通勤出行
Fig. 1 Long-distance commuting by UAM
目前,关于UAM需求的估计多基于公众接受度及其影响因素的调查研究而非真实出行数据,分析结果主观性较强且尚未考虑地理差异性[21-22]。静态化估计出行需求容易忽视UAM系统设计与居民出行选择之间的双向互动关系[23-24]。现有研究多基于UAM收益角度开展优化,较少关注其对地面路网性能的影响。为了提升交通资源配置效率,应系统地评估UAM的引入对交通流的动态影响,以此为依据进行垂直起降场选址。因此,本文以真实的通勤需求为基础构建双层规划模型,模拟垂直起降场的选址布局与居民通勤出行之间的相互作用。研究目标为寻求一种能够最大化关键通勤道路通行效率,同时缩短通勤者出行时间的垂直起降场布局优化方法,以提升城市长距离通勤效率。研究成果可以为未来城市通勤场景下空中交通的选址优化提供可行路径和实践依据。
1 基于活动-出行模拟与双层规划的垂直起降场选址优化方法
本文基于城市居民的真实长距离通勤需求,模拟垂直起降场的选址布局与居民通勤间的交互,提出一种垂直起降场布局优化方法,分为两步。首先,采用聚类方法确定区域内所有起降场候选位置集合C={c1,c2,…,ck,…,cK},以满足对通勤需求的有效覆盖。然后,通过双层规划模型优化垂直起降场布局,最小化通勤者的单程通勤时间,并保证通勤高峰期地面关键道路的运行效率。
根据通勤者a的典型一日出行链“家—工作地—家”,结合真实出行数据为每个通勤者生成人口活动-出行计划Pa。在双层规划模型中,上层做出站点选址决策S与航线连通决策Y,确定垂直起降场位置与航线建立;选址方案生成后,下层根据人口出行计划模拟选址方案下的交通系统运行状况,评估该选址方案对通勤时间与关键道路运行效率的综合影响,并将评估结果反馈给上层用于优化决策。通过迭代循环求解该模型,可以获得一组高质量且兼具多样性的垂直起降场选址方案。
1.1 候选位置确定
1.1.1 长距离通勤需求驱动的聚类选址方法
以覆盖长距离通勤需求为目标,对起讫点进行聚类,确定垂直起降场候选位置。由于典型通勤者早晚通勤的起讫点坐标集合相同,本文选择所有通勤者单次通勤的起讫点进行聚类分析。考虑到UAM的潜在用户主要为长距离出行者,选取距离超过10 km的起讫点作为聚类对象[24],并采用k-medoids算法进行聚类。相比于k-means等聚类算法,该算法选择真实的数据点作为聚类中心,结果对异常值更为稳健,更适合处理真实的地理空间起讫点数据[25-26]。通过覆盖率驱动的迭代聚类,不断增加聚类数,当覆盖率达到阈值θ=80%时,确定的K个聚类中心即为候选站点。同时,为兼顾飞行器续航与降低空域冲突,在聚类过程中引入站点间距约束(2~50 km)[9,23]。聚类算法伪代码如下。
| K←1 |
 |
新窗口打开| 下载CSV
为了检验聚类稳健性,采用无放回随机抽样方法重复抽取原始起讫点集合30次,每次抽取样本量为总体规模的80%,以此构建多个独立子集[27-28]。在每一数据子集均独立实施完整的起讫点覆盖驱动的聚类选址过程,即逐步增加聚类数直至达到预设的覆盖率阈值。通过比较每次聚类确定的聚类数及对应的中心点地理位置,评估候选点选址方法的稳健性。
1.1.2 通勤需求覆盖判定
在聚类过程中,每次确定起降场候选点后,通过计算通勤需求覆盖率评估其对长距离通勤的服务能力。UAM行程可分为3个阶段:出发地至最近起降场的接驳出行、通过电动垂直起降飞行器完成主要航程,以及从到达起降场至最终目的地的末端出行。本文假设候选垂直起降场的服务半径R为3 km[23],当通勤起点与终点分别落入不同起降场的服务范围内时,判定通勤需求得到有效覆盖。站点布局的起讫点对覆盖率为

(1)
式中,D为起讫点对的集合;(Oi,Di)为第i对起讫点;N为起讫点总对数;d(•)为采用半正矢公式计算的距离函数。
1.2 基于多智能体仿真的活动-出行建模框架
根据真实的匿名手机信令数据构建个体层面的智能体模型,生成活动-出行计划。在引入UAM的场景下,智能体的通勤出行方式包括私家车、公共交通、慢行交通(步行与非机动车)和UAM。智能体在仿真过程中通过重新规划路径或更换交通方式来改善自身效用[29],导致道路交通流量的重新分配。迭代过程中采用多项Logit模型进行计划选择,其基本思想是效用越高的计划被选择的概率越大。如,UAM的引入可能促使一部分通勤者在效用提高的情况下选择更快但费用较高的出行方式,从而改变整体交通流量和拥堵分布。计划选择和效用更新为
(2)

(3)
式中,πa(Pa)表示智能体a选择计划Pa的概率;P表示智能体a的计划集合;λ为计划效用的放大系数;表示任意一个备选计划;Uold(Pa)表示上次迭代获得的效用值;Unew(Pa)表示计划的新效用评分;α为更新过程的学习率;Usim(Pa)表示智能体a新一次执行计划Pa获得的效用值。
采用多智能体仿真框架MATSim完成上述效用更新过程。仿真过程包括以下4个步骤(图2):首先,所有智能体执行当前选择的出行计划,通过仿真生成交通流,形成出行时间、活动时间和出行模式等信息;其次,根据仿真结果,利用效用函数计算已执行计划的效用得分;然后,系统选择部分智能体进行重新规划,通过改变路径、更换交通方式的策略生成新候选计划,并将其加入各自的计划集合;最后,所有智能体根据计划的效用得分基于Logit选择机制,概率性地选择一个计划在下一轮迭代中执行。通过多个迭代循环,智能体逐渐淘汰效用低的计划,保留效用高的计划,最终系统收敛到稳定状态。
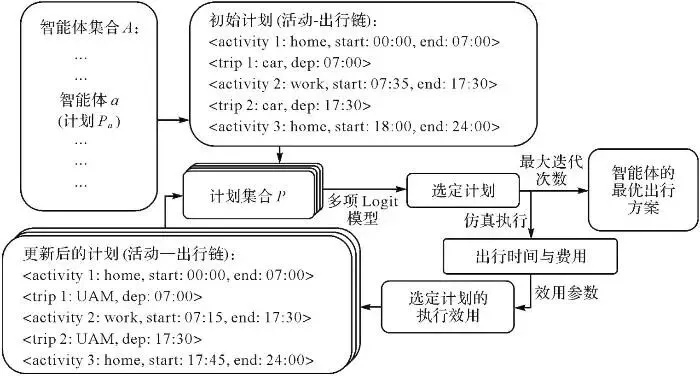
图2 智能体活动-出行计划的仿真过程
Fig. 2 Simulation process of agents' activity-travel plans
1.3 道路拥堵评估
根据道路的旅行时间指数(travel time index,TTI)[30]和车辆计数筛选路网中的关键通勤道路。具体而言,在无UAM的基线场景下,通过仿真计算各道路的车辆计数和TTI,当二者均超过各自分布的90%分位数时,判定该道路为关键通勤道路

式中,F′为通勤高峰期的道路通行时间;F为道路自由流通行时间。
为评估关键道路的通勤效率,本文选取拥堵指数(road network congestion index,RNCI)作为评价指标。该指数根据道路速度性能指数和非拥堵时间比例计算,数值越低表示拥堵程度越高[31]。具体计算过程中,将通勤高峰期划分为T个等长时间间隔,逐一计算各时段的速度性能指数。当该指数小于或等于阈值η′时,判定该时间段内道路处于拥堵状态。最终,结合非拥堵时间比例和速度性能指数,并采用道路长度加权,得到关键通勤道路的RNCI,第r条道路的非拥堵时间比例fr、非拥堵时间间隔数τr,以及在时间间隔t的速度性能指数ηr,t
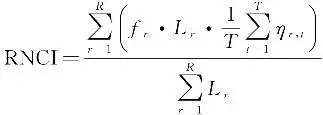

式中,vr,max、Lr为第r条道路的自由流速度和长度;vr,t为第r条道路在时间间隔t的平均通行速度; 是指示函数,若ηr,t>η′,则为1,否则为0。
是指示函数,若ηr,t>η′,则为1,否则为0。
1.4 双层规划模型
1.4.1 上层模型
本文以提升通勤效率和关键通勤道路性能为目的,在起讫点所在两区域内优化垂直起降场位置,将选中的站点以直线航线的方式连接[24]。以通勤起讫点覆盖估计通勤需求,根据需求的高低设定站点容量为12或8个机位[32]。以所有通勤者的平均单程通勤时间Z1和关键通勤道路拥堵指数Z2作为目标函数,构建多目标优化模型。决策变量sk∈{0,1}为站点选址变量,sk=1表示在第k个候选位置建立站点,否则为0;yk,j∈{0,1}为航线连通变量,yk,j=1表示在第k和j个站点间建立航线,否则为0。站点选址集合S={sk|k∈I},航线连通集合Y={yk,j|k,j∈I},候选站点索引集I={1,2,…,K}。






式中,A为所有通勤者集合;na为通勤者a的行程数;ta,i为第i段出行的时间;gk、gj分别表示第k和j个站点所属区域;G表示区域的集合;Ig表示区域g∈G内站点的索引集;d(ck,cj)为采用半正矢公式计算的第k和j个站点构成航线的距离。
优化选址过程设置约束条件:航线只在选中的站点间连通(式(11));起讫点所在区域有站点覆盖,且航线与通勤方向保持一致,避免同一区域内的无效连通(式(12)—(13));UAM航线距离不少于h0=10 km[24](式(14))。
1.4.2 下层模型
下层模型为UAM引入后的交通网络流量分配问题。基于上层模型所给定的垂直起降场布局与航线方案,采用多智能体仿真框架对智能体的出行与活动进行模拟,求解道路网络中的交通流最优分配。在仿真过程中,智能体a通过参与活动获取正效用Uact,i,而出行则带来负效用Utrav,i,计划仿真系统的总体评分函数由两种效用之和构成[33]。对于智能体a的计划Pa,其效用可表示为U(Pa)。在此基础上,可进一步推导出行时间节省价值(value of travel time saving,VTTS)[34]



式中,na为智能体a的行程数;βact为活动的时间边际效用;βtrav,q为出行方式q的时间边际效用;βm为单位出行距离的金钱边际效用;σq为出行方式q的单位距离出行费用;ttyp,i、tact,i、t0,i分别为第i项活动的典型、实际和最小持续时间;ti为第i段出行的时间;di为第i段出行的距离;VTTSq为出行方式q的出行时间节省价值。
每个智能体的目标是最大化其出行计划的效用,智能体通过不断地尝试和调整计划集合P中的不同出行计划,逐步优化自身选择,实现交通网络均衡,此时每个代理找到使其效用最大的计划,即

式中,表示智能体a的最优出行计划。
1.4.3 算法求解
本文采用第二代非支配排序遗传算法(non-dominated sorting genetic algorithm Ⅱ,NSGA-Ⅱ)求解上层选址优化问题,下层通过多智能体交通仿真评估不同布局方案对交通系统的影响,从而构建双层规划模型的求解框架[35]。求解流程如图3所示,上层利用遗传算法的进化搜索与精英保留生成候选站点方案,下层进行交通流分配与系统性能评估。下层的初始出行计划基于无UAM场景下的真实出行数据生成,在迭代过程中,代理根据效用函数不断调整出行方式并选择是否使用UAM。通过上、下层的交互迭代,实现反馈式优化,最终收敛至最优选址方案。
图3 基于双层规划的UAM通勤站点选址求解流程
Fig. 3 Bi-level optimization-based site selection procedure for UAM
采用二进制编码表示布局方案,每个候选站点对应染色体中的一个基因位,每条染色体均表示一个完整的站点选址方案。为提升种群质量并减少无效解,在种群初始化及交叉变异操作中引入了解修复机制:在生成二进制染色体时,需确保起讫点所在区域内均至少选中一个站点。若某一区域g′未被覆盖 ,则强制选择该区域中覆盖起讫点数最高的第k*个候选站点,以保证解的可行性
,则强制选择该区域中覆盖起讫点数最高的第k*个候选站点,以保证解的可行性


式中,
此外,为满足站点间最小距离约束以服务长距离通勤,若选址方案无法构成至少一条有效航线,则该染色体将直接被分配一个理论上的最差适应度值,即平均通勤时间目标取无穷大且关键通勤通道指标取最低值,使该无效解在后续的遗传竞争选择中自然淘汰。
2 试验分析
2.1 试验区与数据
本文选取南京市江南主城六区(玄武、秦淮、建邺、鼓楼、栖霞、雨花台区,即图4中区域一)与江宁区(图4中区域二)之间的通勤出行作为试验案例。基于2021年11月1日的手机信令数据,按照速度与路线的非直线系数阈值规则等[36]识别出3201名通勤者的出行模式,并结合POI数据确定其活动类型。通勤起讫点间距的统计结果显示,区域一与区域二之间以长距离通勤为主,通勤压力明显。两区域间平均通勤距离超过10 km,符合UAM运营的最短航线距离要求(图5)。本文将速度低于15 km/h的出行识别为慢行交通,将非直线系数低于2.3的出行识别为私家车,其余为公共交通。将通勤者的出行目的地与POI数据匹配识别活动类型。该日期为周一且天气晴朗,能够反映城市典型的通勤特征。从数据可以看出,私家车是研究区域内最主要的通勤交通方式,其数量远超公共交通和慢行交通,反映了研究区域内高峰时段道路拥堵的主要来源(图6)。慢行交通集中于区域一与区域二交界的核心地带,而公共交通与私家车连接了外围及偏远区域。南京市的通勤高峰期为7:00—9:00与17:00—19:00。取道路的速度性能指数阈值为0.5,结合道路的车辆计数与旅行时间指数(TTI)计算结果,共筛选出468条关键通勤道路。
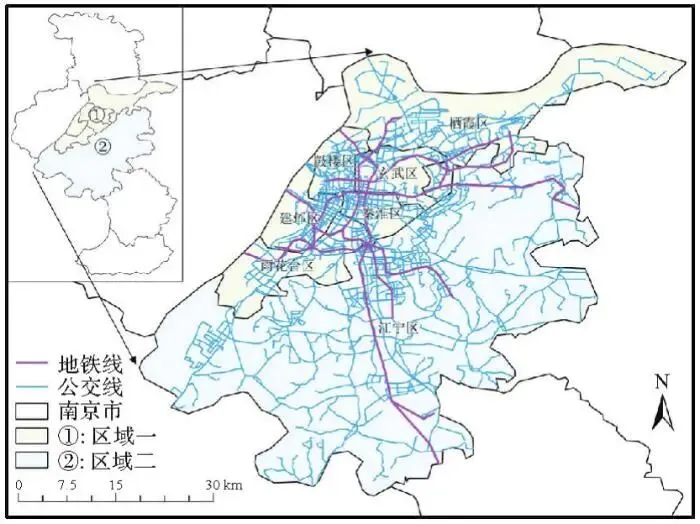
图4 试验区域
Fig. 4 Study area
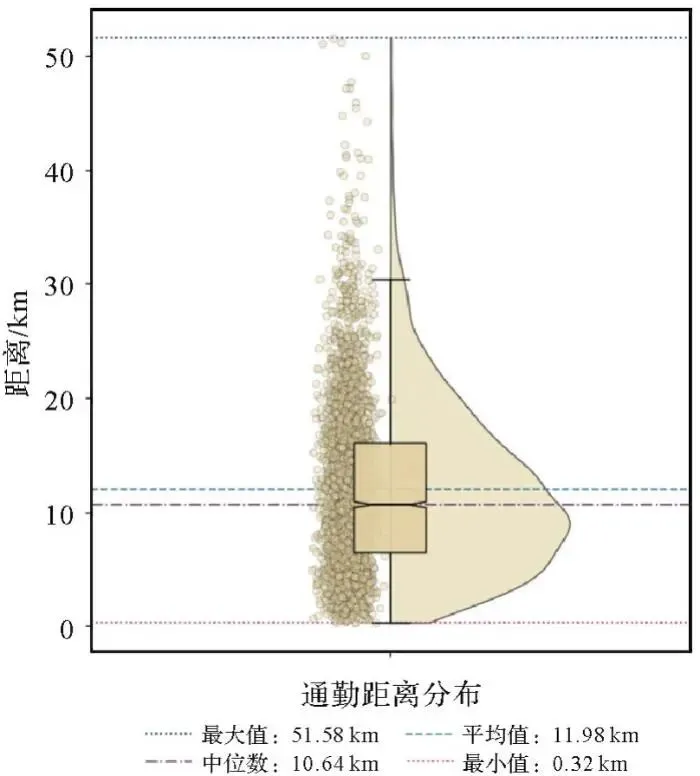
图5 通勤距离统计
Fig. 5 Commuting distance statistics
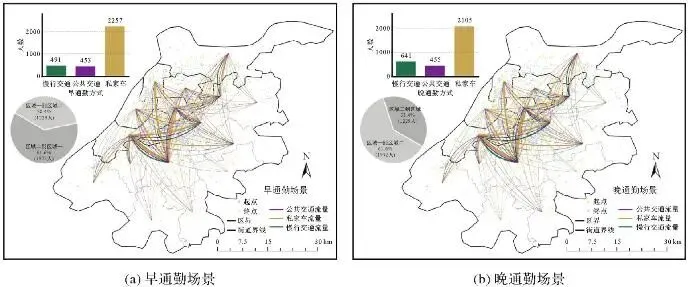
图6 通勤模式统计
Fig. 6 Commuting mode statistics
2.2 候选站点位置及聚类稳健性检验
在原始的3201对通勤起讫点中,筛选出1718对出行距离大于10 km的长距离通勤起讫点进行聚类分析。结果表明,随着聚类数K的增加,聚类中心对起讫点的覆盖率持续提升,意味着站点能服务更多的长距离通勤需求(图7)。在覆盖率达到80%的条件下,共识别出42个聚类中心作为垂直起降场候选位置(图8)。这些聚类中心系通过聚类分析所得,仅用于后续布局优化的理论建模,不对应任何实际已建或规划中的起降场位置。其中,区域一分布20个,区域二分布22个,整体可实现81.8%的起讫点对覆盖率。
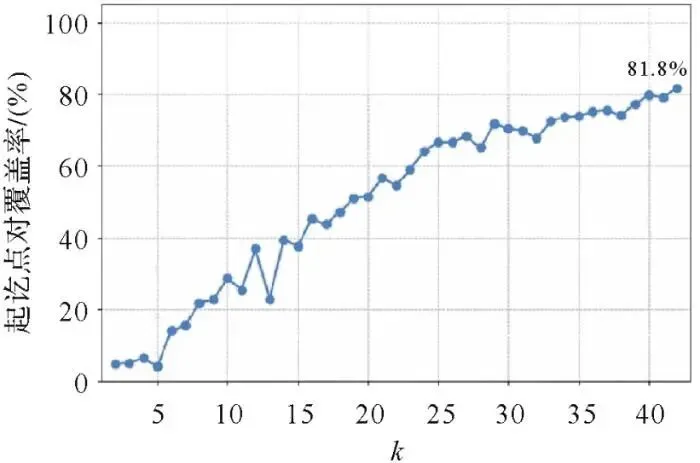
图7 聚类过程
Fig. 7 Clustering process
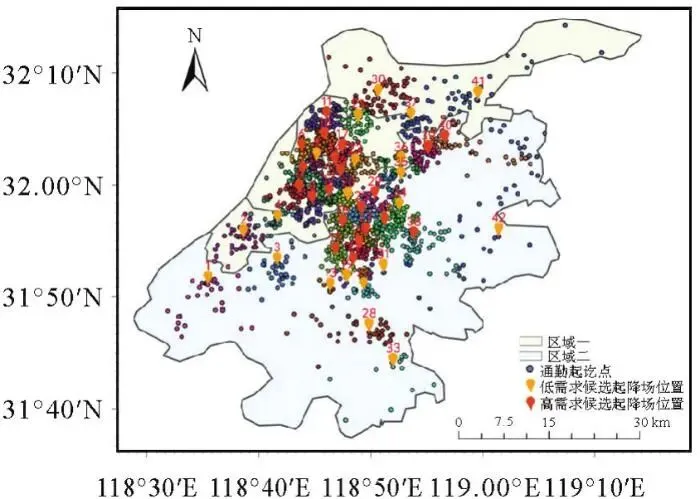
图8 候选起降场空间分布
Fig. 8 Spatial distribution of candidate vertiport locations
稳健性检验结果(图9)显示,在覆盖率大于等于80%的目标下,取42作为最优聚类数估计值。多次聚类的聚类中心分布图中,候选位置并非随机散布,而是明显形成若干簇,说明聚类中心具有稳定性。中心点形成的点云密度较高,表明其对数据扰动不敏感。尽管少数区域中点云分布相对稀疏,点位置存在轻微波动,但整体偏移幅度普遍较小。
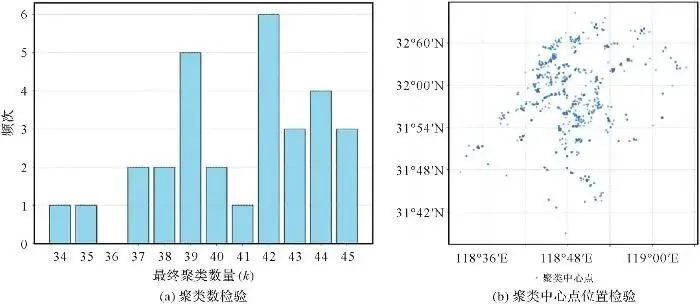
图9 聚类的稳健性检验
Fig. 9 Robustness test of clustering
2.3 效用系数计算
本文考虑了典型通勤者工作和家庭两种活动,以及私家车、公共交通、慢行交通和UAM 4种出行方式。工作和家庭的地点分别位于不同区域。
在效用评分函数的具体设定中,通勤者单位时间内执行活动的效用βact为6/h[29],而出行负效用由时间成本和自费成本构成。以私家车为基准出行方式[34],不同出行方式的出行时间节省价值(VTTS)受舒适性、灵活性及用户支付意愿等因素影响。取南京市的VTTS为35.8元/h[37],结合式(17)可得货币的边际效用βm为0.335元,则执行活动的收益相当于17.91元/h。由此,基于各种出行方式与基准方式在VTTS上的差异可推导其出行时间边际效用系数[38-39]。此外,私家车、公共交通和UAM的单位距离出行费用的参考行业公开报告和南京市公共交通票价计算[39]。所有参数具体取值见表1,UAM的出行时间边际效用系数绝对值最大,反映了其作为一种高时间价值的出行方式,使用者对时间成本最为敏感。
表1效用参数取值
Tab. 1
2.4 选址结果
采用NSGA-Ⅱ算法共获得5个非支配解,构成帕累托最优解集。超体积值是评价多目标优化算法结果收敛性与多样性的综合指标,数值越大意味着算法所获得的帕累托前沿解集在整体性能上更优、分布更均匀。本文以(20 000,0)为参考点计算遗传算法进化到每一代的超体积值,该点对应了平均旅行时间和拥堵指数两个目标的“最差”可接受值。随着迭代次数的增加,超体积值逐渐提升并最终趋于平稳,表明算法已成功收敛,并在搜索过程中找到了质量较高且分布均匀的解集(图10)。帕累托前沿(图11)上的解反映了两冲突目标间的不同权衡关系。任意一非支配解都无法在所有目标维度上完全优于其他解,因此这些解代表了系统层面的整体最优状态。从多目标优化的角度,最终筛选得到的具体优化解集方案见表2。
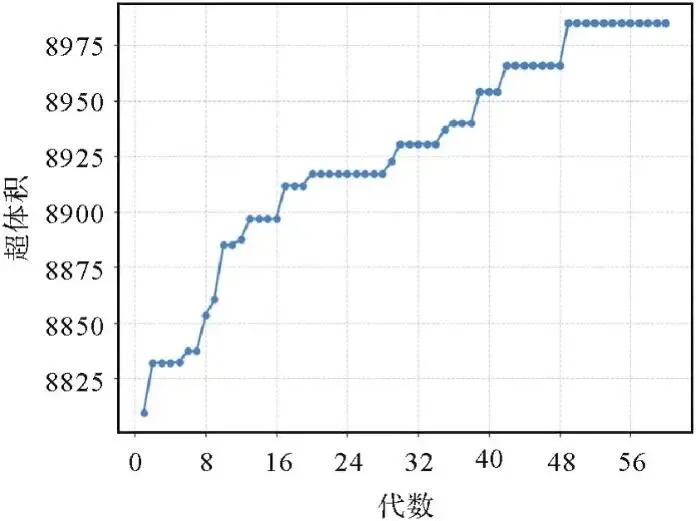
图10 超体积指标收敛曲线
Fig. 10 Convergence curve of the hypervolume indicator
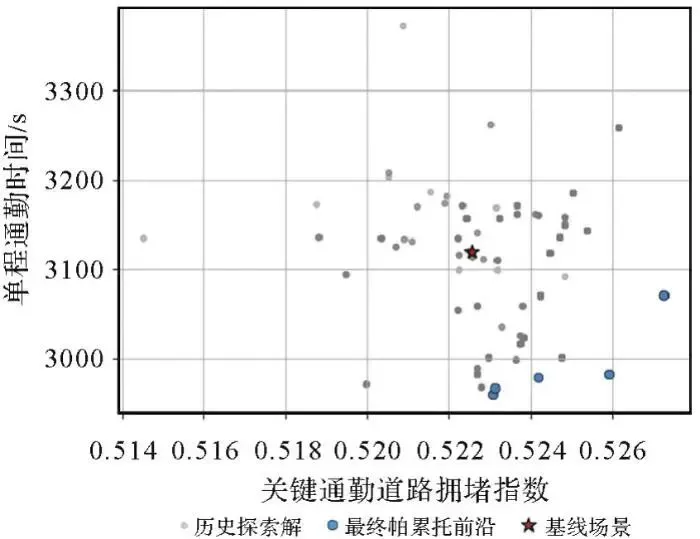
图11 帕累托前沿
Fig. 11 Pareto front
表2起降场布局的帕累托解集方案
Tab. 2
在未引入UAM的基线场景下,研究区内所有通勤者的单程通勤时间为3119 s(约52 min),关键道路拥堵指数为0.522 5。引入UAM后,通勤效率和地面关键道路交通状况均得到改善。所有非支配解的单程通勤时间都显著低于基线场景,其中方案1可降至2959 s(约49.3 min),通勤时间缩短约5%。同时,所有方案的拥堵指数均高于基线,表明UAM的引入有效缓解了地面关键道路的交通压力。不同方案在提升通勤效率和缓解道路拥堵这两个目标之间表现出不同侧重,同时也对应着不同的资源投入。因此,最终方案的选择需要决策者在多维度的效益与成本间进行综合决策。具体而言,方案1在缩短通勤时间上效果最显著,但所需的资源投入也最高(150条航线)。相比之下,方案5虽然在通勤时间上的改善幅度略低,但所需的资源投入最少(63条航线),且更利于缓解地面交通拥堵。而介于两者之间的方案2则展现了较优的效费比,能以中等的资源(94条航线)达到接近最优解的通勤时间。
2.5 通勤时间变化
2.5.1 通勤时间随距离变化
长距离通勤更能体现UAM的优势,而不同起降场布局方案对远距离通勤效率的提升效果存在差异(图12)。在所有方案中,UAM场景下的通勤时间整体低于基准场景,其中30~50 km区间内的差异最为显著。随着通勤距离的增加,基准场景下的通勤时间先逐渐上升,后于30 km处开始出现波动,这可能是因为部分长距离通勤者会选择城市快速路等高等级道路,其较高的通行速度在一定程度上抵消了距离增加带来的时间成本。由于UAM主要面向长距离通勤,其在30~45 km区间展现出明显的时间优势,通勤时间甚至低于部分中短距离出行。而在接近50 km的超长距离区间,通勤时间再次上升,原因可能在于起降场布局受限,未能有效覆盖少量超长距离通勤者的需求。此外,不同布局方案的通勤效率改善效果会随距离发生显著变化。在方案2、方案3和方案5的UAM场景中,约50 km的通勤距离对应的早通勤时间成本明显增加,而方案1和方案4则相对稳定。可能是因为后两种方案的布局在远距离连接方面形成了更高效的航线网络,能满足更多长距离通勤需求。
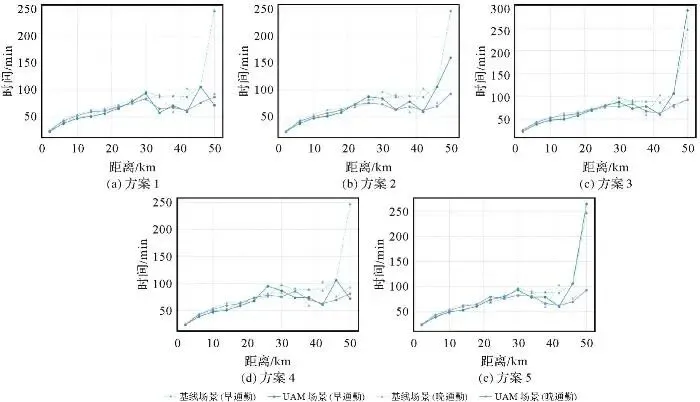
图12 不同起降场布局下通勤时间随距离的变化
Fig. 12 Changes in commuting time with distance under different vertiport layouts
2.5.2 通勤时间节省的空间分布
UAM的引入显著提升了长距离通勤效率,加强了区域之间的交通联系(图13)。从空间分布上看,起降场覆盖的区域普遍实现了较为明显的通勤时间缩减,时间节省的程度存在空间差异。地理位置相对偏远、远离通勤走廊中间地带的区域获得了更大的时间效率收益。说明UAM能有效克服长距离地面通勤的限制,提升边缘地区的可达性。这一趋势在所有选址方案中都保持一致,且江宁区最南部的街道始终表现出最多的时间节省。相反,一些缺少起降场布设的区域在引入UAM后出现了通勤时间增加的情况。其原因可能是部分起降场的接驳交通加剧了局部道路拥堵,并向周边扩散,而起讫点附近未接入UAM,仍依赖地面交通出行的通勤者在通勤途中遇到拥堵或绕行,导致时间延长。此外,局部区域的通勤时间变化对起降场布局结构高度敏感。如,方案3的布局使北部形成了更高效的空中走廊,显著优化了该方向的通勤效率;而在方案4中,东部区域出现了大范围的通勤时间增加,这表明该选址方案未能有效覆盖该区域的交通需求。
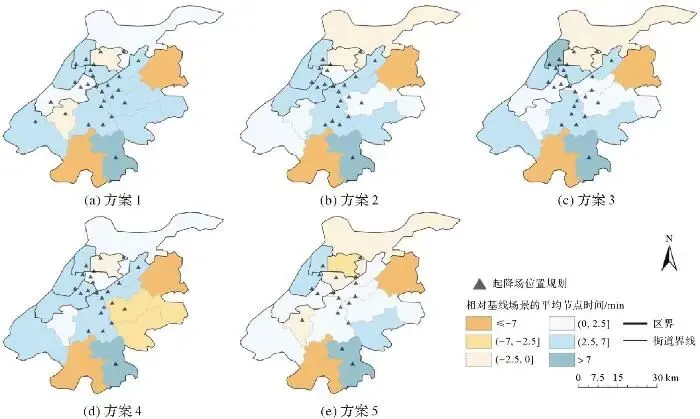
图13 不同起降场布局下的通勤节省时间分布
Fig. 13 Spatial distribution of commuting time savings under different vertiport layouts
3 结论
本文针对未来城市交通出行场景,研究UAM引入后的城市长距离通勤问题,构建了一种结合活动-出行模拟与双层规划模型的垂直起降场布局优化方法。该方法首先采用长距离通勤需求驱动的聚类算法确定候选集,保证垂直起降场的需求覆盖,而后结合多智能体仿真框架和双层规划模型,兼顾通勤者出行效率与地面交通运行状况进行起降场布局优化。以南京市部分区域为案例,优化结果表明该方法在保证关键路段运行效率的前提下,能够显著提升长距离通勤者的通勤效率。主要创新点包括:①提出长距离通勤需求驱动的候选位置识别方法,在覆盖率约束下保证了候选点的合理分布与稳健性;②所构建双层规划模型的上层基于多目标遗传算法优化站点布局,下层基于多智能体仿真模拟精细的活动-出行链,评估通勤效率与道路性能,实现了选址与出行行为的互动反馈。但本文仍存在一些不足:①本文基于交通仿真进行布局优化理论建模,不涉及真实场景下的垂直起降场地址,未考虑现实的空域管理、航线规划、气象条件、建设投资与运营等,模型结果是理论最优而非现实情境中的垂直起降场最优布局;②仿真参数及效用函数设定依赖经验和文献取值,可能影响模型结果的普适性,实际选址规划过程可结合针对本地通勤者的出行选择偏好调查数据进行更精准的标定。未来研究可进一步融合多源数据,纳入垂直起降场实际规划布局及运行安全约束,并深化经济效益分析,以支撑多模式交通规划与城市地理空间的优化布局。

往期推荐
资讯

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 【升旗仪式】南京一校沈北分校2025-2026学年度下学期“养文明习惯 做品行少年”主题升旗仪式
- 南京市荆门商会第三届第二次理事会会议圆满召开
- 近期落地南京鼓楼的这些项目,原来都看中这个……
- 3.24-3.26在南京
- 以法之名 守护碧水 | 长安南京律师事务所助力“世界水日”“中国水周”暨“净滩行动”
- 南京-水性聚合物乳液合成、制备新技术应用交流研讨班
- 南京艾倍科幼儿园 第四周升旗仪式
- 【南京】南京市2026年事业单位统一公开招聘工作人员公告
- 南京航空航天大学教师发展与教学评估中心/高等教育研究所教学管理岗位招聘启事
- 南京看心理/抑郁/焦虑/睡眠障碍/神经衰弱/植物神经紊乱医院〡神康心理医院
