SCI期刊:International Journal of Applied Earth Observation and Geoinformation (JAG)
英文题目:MapMate: an LLM-based assistant for collaborative map design through large language models
中文题目:MapMate:基于大语言模型的协作式地图设计助手
发表时间:2026年1月6日
文章链接:https://doi.org/10.1016/j.jag.2025.105073
🗺️ 研究背景
地图设计是地理信息传达与应用的基础,但长期以来是一项高度依赖专业知识的复杂任务。数字地图虽然提供了更大的设计灵活性和交互性,但其配置系统变得日益复杂和层级化,需要操作者掌握专业的制图知识和繁琐的界面操作。尽管Mapbox、Carto等数字制图平台降低了公众使用地图的门槛,但真正实现有效的地理信息表达仍需要大量专业知识。随着大语言模型(LLM)的兴起,自然语言交互为解决这一难题带来了新可能。
🎯 研究目的
本研究旨在开发一个名为MapMate的LLM驱动框架,使用户能够通过自然语言对话完成地图设计任务,而无需掌握复杂的制图配置操作。具体目标包括:
构建一个能够理解用户设计意图、验证操作可行性、分解任务并调用制图工具的系统;
建立包含制图原则和平台配置规范的分层知识库,弥补LLM在领域知识上的不足;
实现多轮交互中的操作记忆和设计状态管理,保证迭代修改的连贯性;
通过案例验证MapMate在单图层调整、跨图层协调和上下文感知地图设计中的有效性。
🧠 研究意义
MapMate是首个将大语言模型与地图设计知识库、任务规划、工具路由和记忆管理深度集成的协作式制图框架。它从根本上降低了地图设计的技术门槛:专业制图师可以更高效地完成复杂设计,非专业用户也能通过自然语言表达自己的设计想法。与已有的MapGPT(侧重自主地图生成)和CartoAgent(侧重风格迁移)不同,MapMate专注于迭代式、目标导向的细粒度修改,支持跨图层的协调设计和项目全貌的上下文感知。定量评估表明,即使是没有专业背景的本科生,在使用MapMate后也能接近专业级的表现(准确度评分4.95/5),而单LLM基线在复杂任务中性能急剧下降。这项工作为下一代人机协作的智能GIS应用奠定了基础。
🗂️ 研究内容
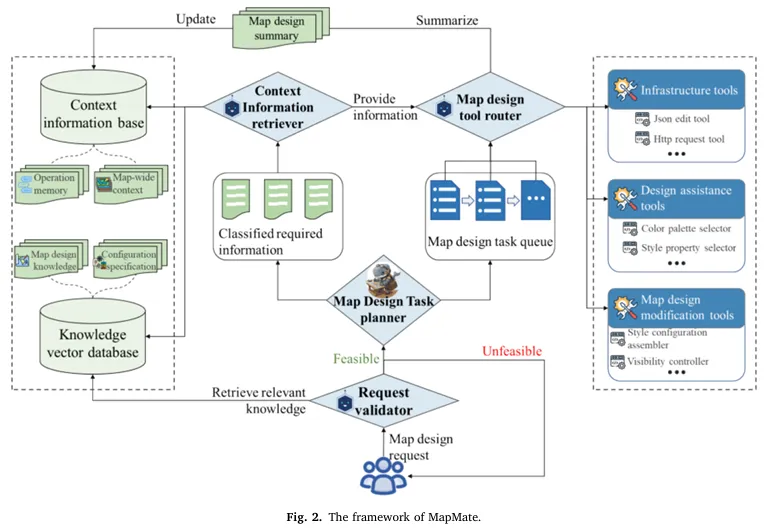
构建MapMate框架四大核心模块:请求验证器(评估请求可行性)、任务规划器(将目标分解为可执行操作)、上下文检索器(维护项目连贯性)、工具路由器(调用具体制图功能)。
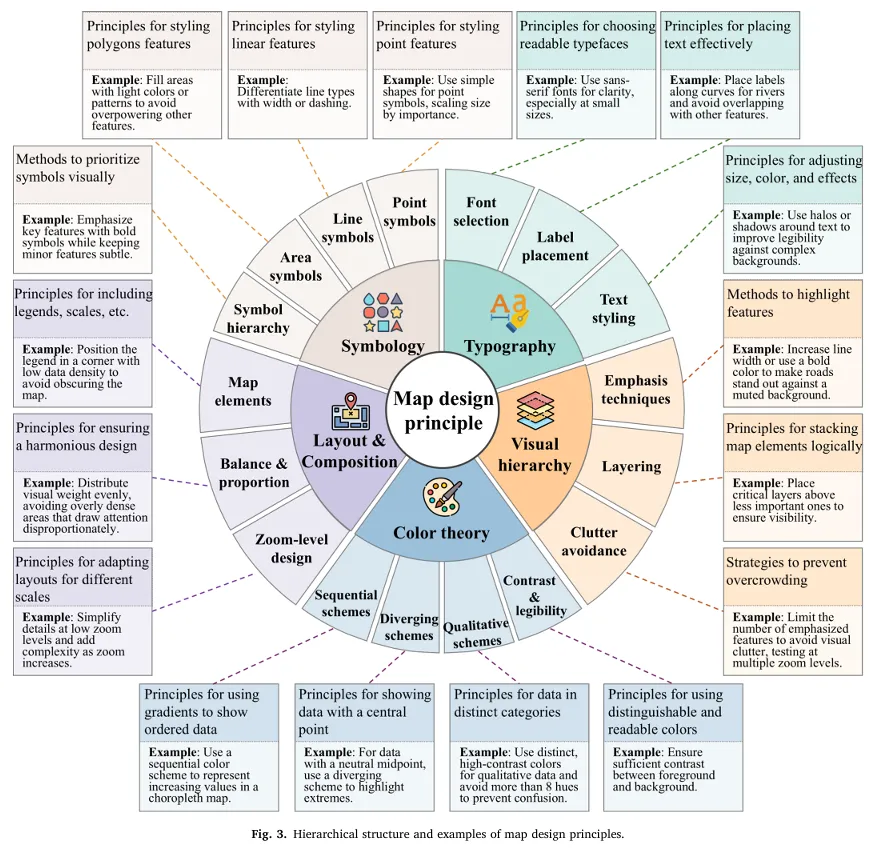
建立分层的制图设计知识库:涵盖色彩理论、符号学、视觉层次、字体排印、布局与构图五大类,包含157–224条原则,来自教科书、教程和博客。
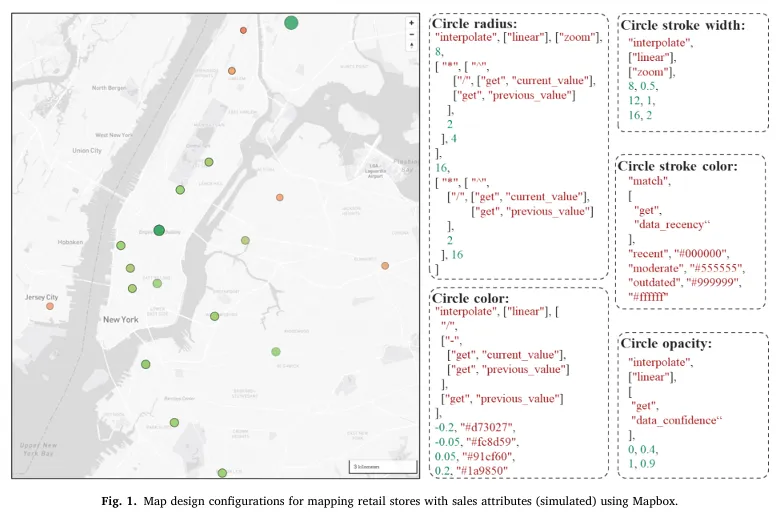
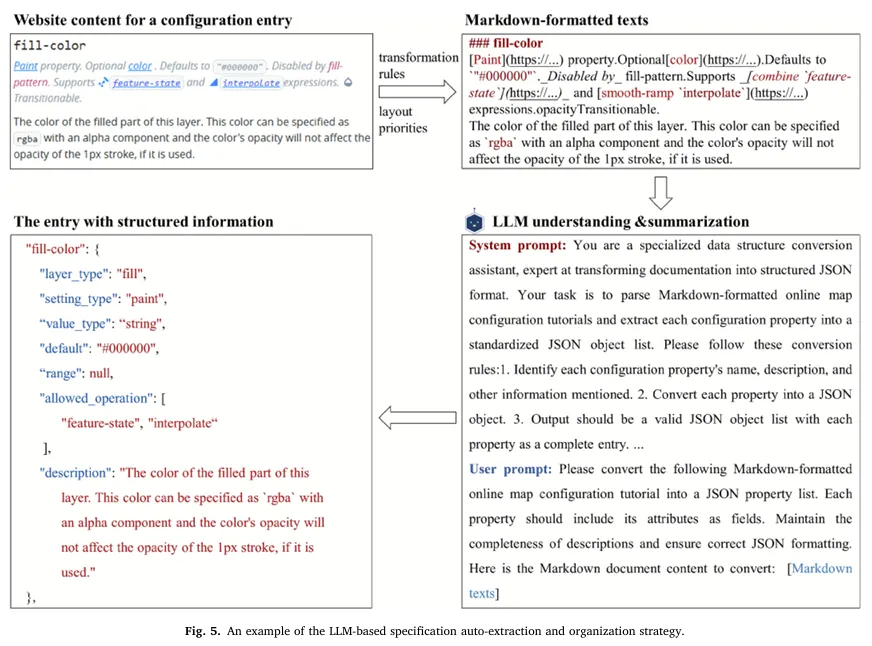
实现平台配置规范的自动提取与整合:从在线文档中提取Mapbox等平台的配置项,与制图原则关联。
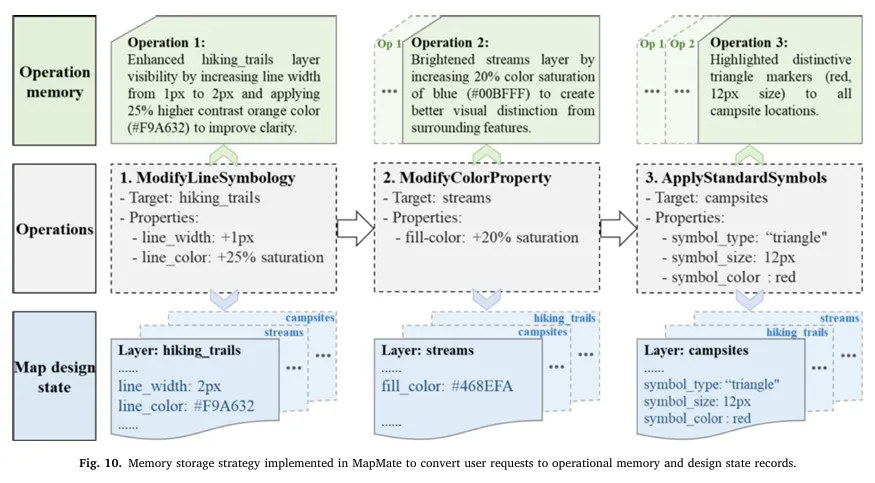
设计双记忆策略:操作记忆(记录用户请求和修改历史)和状态记忆(保存当前地图的全貌设计状态),解决LLM在多轮交互中的记忆限制。
设计自然语言驱动的修改流水线:请求验证→任务分解→上下文检索→工具调用与执行。
通过三个案例(单图层优化、跨图层协调、上下文感知地图设计)和定量用户实验(6名不同背景用户,每人每个案例重复5次)验证框架效果。
🌍 研究区概况
本研究不涉及特定地理区域,而是以地图设计工具和方法为研究对象。案例中使用了深圳市“15分钟生活圈”覆盖率、长三角人口分布、南京市主城区土地利用分类等公开数据集作为地图内容。
📊 数据概况
案例数据:
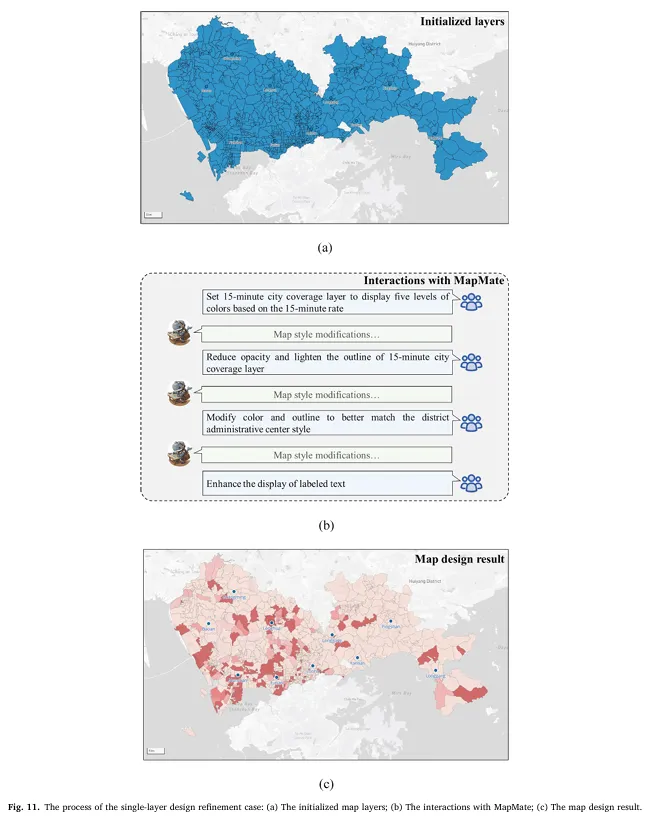
单图层优化:深圳市15分钟生活圈覆盖区多边形和区行政中心点。
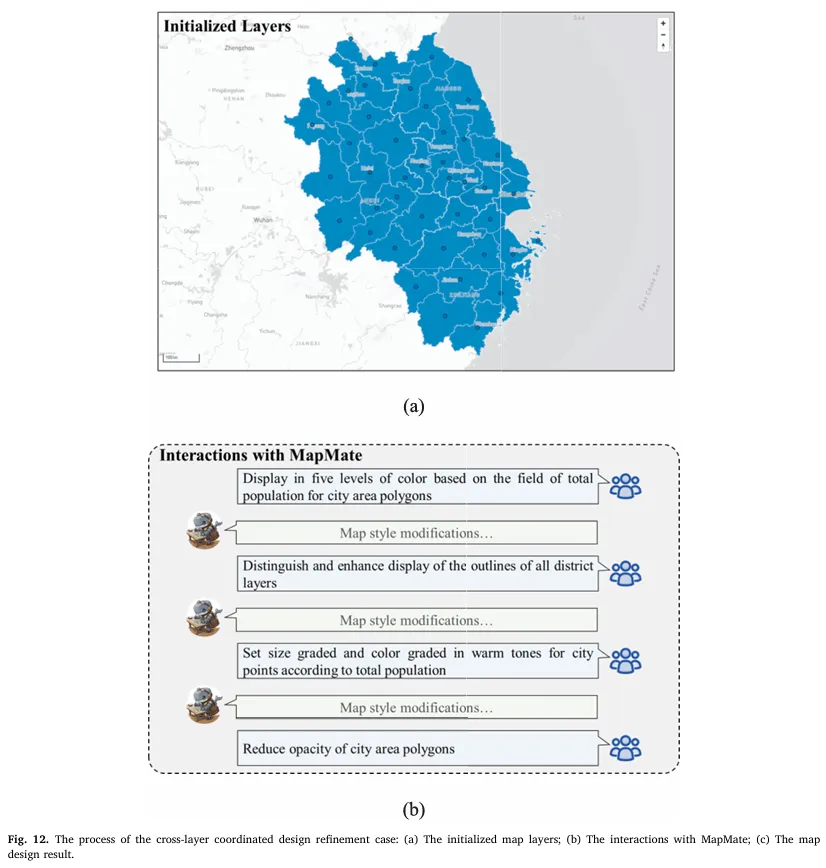
跨图层协调:长三角城市人口分布(城市面、行政边界、城市中心点)。
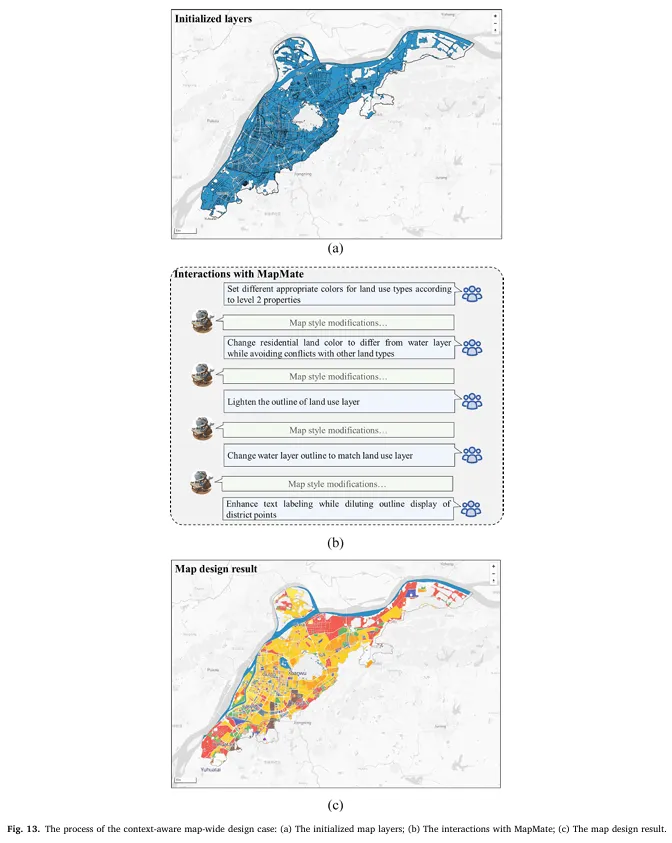
上下文感知:南京市主城区土地利用分类(城市用地、水体、行政边界)。
制图知识库构建材料:16本经典制图教科书(如《Cartographer‘s Toolkit》《Designing Better Maps》)、15个在线教程(Penn State GEOG 486、Axis Maps等)、17篇专业博客(ArcGIS Blog、GisGeography等)。
平台配置规范:从Mapbox官方文档中自动提取配置条目。
LLM模型:Claude Sonnet 4用于验证器和规划器,GPT-4.1 mini用于检索器和路由器,温度参数均设为0以保证可重复性。
⚙️ 研究方法
MapMate框架:
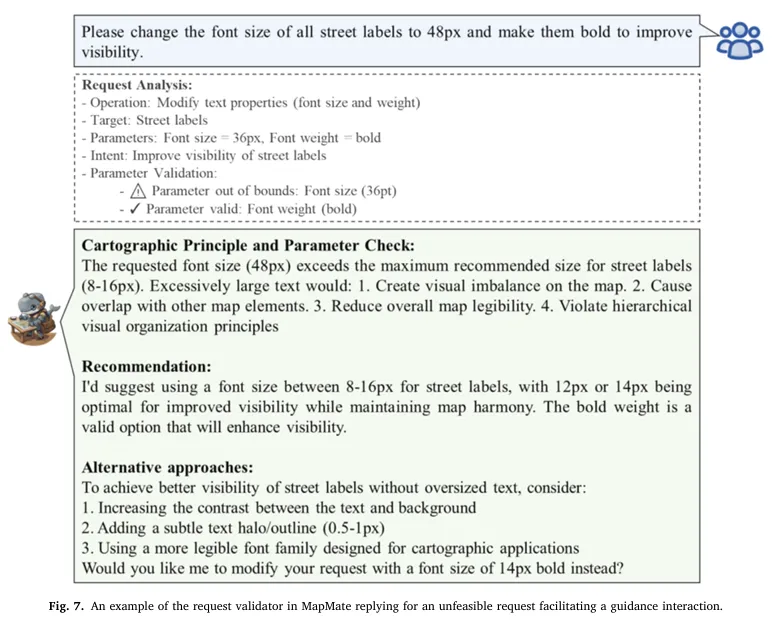
请求验证器:先进行意图分类,然后通过混合检索(树遍历+向量相似度)获取相关制图原则和平台规范,验证操作可行性。若不可行,生成带有约束解释和修改建议的反馈。
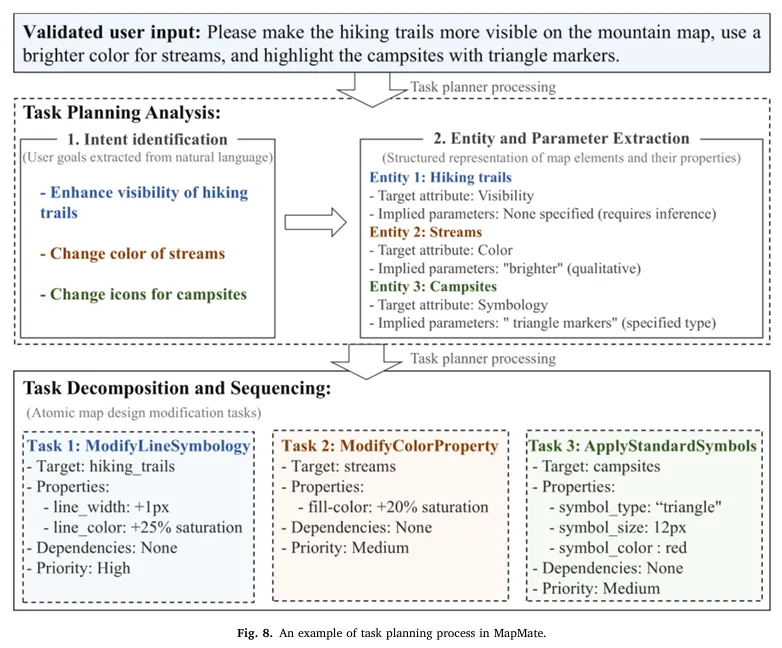
任务规划器:将自然语言需求解析为显式和隐式目标,分解为有序操作步骤(如“识别目标图层→确定具体操作→设置参数”),并识别所需上下文信息,生成结构化任务序列。
上下文检索器:通过基于规则和语义向量的混合检索,从操作记忆和状态记忆以及知识库中提取相关信息。
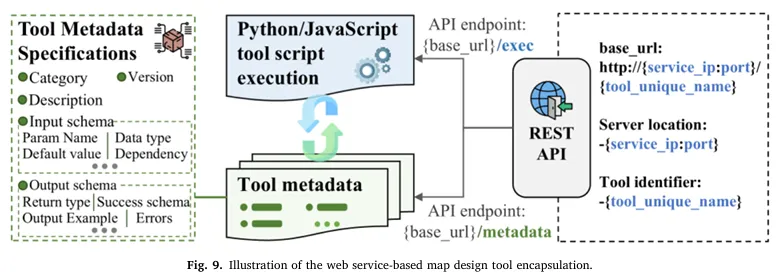
工具路由器:维护工具注册表,通过LLM动态匹配任务与工具(包括基础设施工具、设计辅助工具、制图修改工具),每个工具封装为REST API服务。
知识库构建:
分层树状结构(5大类 → 子节点 → 叶节点),叶节点包含可操作的制图指导原则。
利用Claude Sonnet 4通过上下文增强的自指令方法生成初步知识条目,经专家审核后入库。
平台规范自动提取:将在线文档转换为Markdown,用LLM工作流提取结构化JSON配置信息。
支持持续更新:新知识条目经用户或LLM分类后,与现有规范匹配并加入向量库。
双记忆策略:
定量评估:
6名参与者(2名本科生、2名GIS专业研究生、2名GIS从业者),每人每个案例重复5次。
比较基线:单LLM代理(Claude-4-Sonnet)、多LLM系统(与MapMate相同架构但无知识库和记忆增强)。
评估指标:执行时间 + 专家(4名独立评审)对准确性、完整性和美观性的5分制评分。
组内相关系数ICC:0.84–0.98,评审一致性良好。
📈 研究结果
知识库构建成果:
案例验证结果:
单图层优化(深圳市15分钟生活圈):用户通过4轮对话,依次建立5级分级设色、降低面透明度、修改政府设施符号、增强文字标注。MapMate准确执行了每步操作。
跨图层协调(长三角人口分布):用户要求“增强行政边界层次感”,MapMate自动协调了多个边界图层的描边宽度和颜色;要求“城市中心点用比例符号表达人口”,系统同时调整了点的大小和颜色强度。
上下文感知设计(南京土地利用):用户要求“改变居住用地颜色以避免与水体冲突”,MapMate分析了现有调色板,选择了替代色避开与水体蓝色的冲突;后续调整了面描边、水图层描边和文字标注,体现了对项目整体设计状态的感知。
定量评估结果:
准确度:MapMate各用户组平均得分≥4.95/5,专业人士仅比本科生高0.05分(p=0.021,但差异极小),说明自然语言交互大幅缩小了专业差距。
完整性:无显著用户组效应(F=0.133,p=0.876),所有用户均成功完成全部设计任务。
美观性:本科生评分略高于专业人士(p=0.0489),反映不同审美框架。
执行时间:MapMate耗时较长(因知识检索和上下文维护),但在复杂场景中(跨图层、上下文感知)输出质量远超基线。
基线对比:单LLM在任务复杂度增加时性能急剧下滑;多LLM基线在简单任务中表现较好,但在上下文感知场景中显著下降。MapMate在所有指标上始终最优。
💬 主要讨论
✨ 创新点
首个面向迭代式、目标导向的地图设计LLM助手,支持自然语言交互下的精细修改,而非一次性的地图生成。
显式分层知识库:将制图原则与平台配置规范结构化,通过混合检索(树遍历+向量)提供可操作的制图指导。
双记忆策略:操作记忆+状态记忆,解决了LLM在多轮交互中遗忘历史操作和丧失全局语境的问题。
模块化工具路由+验证-规划-执行流水线:确保请求可行性、任务可分解性和执行的准确性。
定量评估证明自然语言交互大幅降低专业门槛:普通人也能做出专业级地图。
⚠️ 不足与展望
平台泛化性待验证:当前实现和案例仅针对Mapbox,虽然架构支持多平台,但尚无实证。
缺乏领域特定设计知识:不同应用领域(如水文图、规划图)有各自的符号化惯例和设计标准,MapMate未集成这些。
无法进行数据统计分析与自动分类:不能根据数据属性(如自然断点法)自动选择分级设色方案。
无个性化学习:不能适应用户的个人偏好或组织设计规范。
未来方向:多平台集成、领域知识扩展、数据理解能力(统计与分类)、个性化记忆、视觉设计特征提取。
📌 总结
本研究提出了MapMate——一个基于大语言模型的协作式地图设计助手。它通过四大核心模块(请求验证器、任务规划器、上下文检索器、工具路由器)将用户的自然语言设计意图转化为可执行的地图配置操作。MapMate集成了包含157–224条制图原则的分层知识库和平台配置规范,并通过操作记忆与状态记忆的双重记忆策略,实现了多轮交互中的上下文感知和设计连贯性。三个实际案例(单图层优化、跨图层协调、上下文感知设计)和定量用户实验(6名不同背景用户、5轮重复、专家盲审)表明:MapMate在准确度(≥4.95/5)、完整性(全完成)和美观性上均显著优于单LLM和多LLM基线;更重要的是,它使非专业用户的表现接近专业水平,大幅降低了地图设计的技术门槛。MapMate代表了下一代人机协作智能GIS应用的重要方向。