研究背景
在电网安全巡检过程中,人工巡检耗时耗力的问题普遍存在,智能巡检机器人的引入可以明显提高安全巡检效率。基于挂轨(rail-mounted,MR)巡检机器人智能巡检功能开展保障性运维工作,可有效提升服务的深度和效率,突破传统人工巡检的限制,实现服务智能化。MR巡检机器人在工作过程中需要进行室内定位以精准传递运维信息,但是由于室内环境复杂,信号传播过程中干扰较多,传统的室内定位技术往往难以满足保障性运维工作中的高精度定位要求。因此,提高定位精度是MR巡检机器人开展电网保障性运维工作的重要前提。
主要创新点
1)针对传统室内定位方法定位精度低、稳定性差等问题,本文提出一种改进的图采样与聚合(graph sample and aggregate,GraphSAGE)神经网络的定位方法。首先分别采集不同类型射频信号的指纹数据,转换为图形数据,将经过处理的图形数据集分为训练集和测试集,进行GraphSAGE神经网络的训练。
2)本文在利用GraphSAGE神经网络进行定位的基础上,采用WKNN算法进行定位结果优化。改进的GraphSAGE神经网络定位算法流程如图1所示,即在GraphSAGE神经网络利用AP之间以及AP与RP之间的几何拓扑关系进行定位的基础上,融入WKNN算法利用各个RP接收点之间的相对关系进行定位,从而充分利用指纹数据中蕴含的几何拓扑信息,有效提升了定位精度。
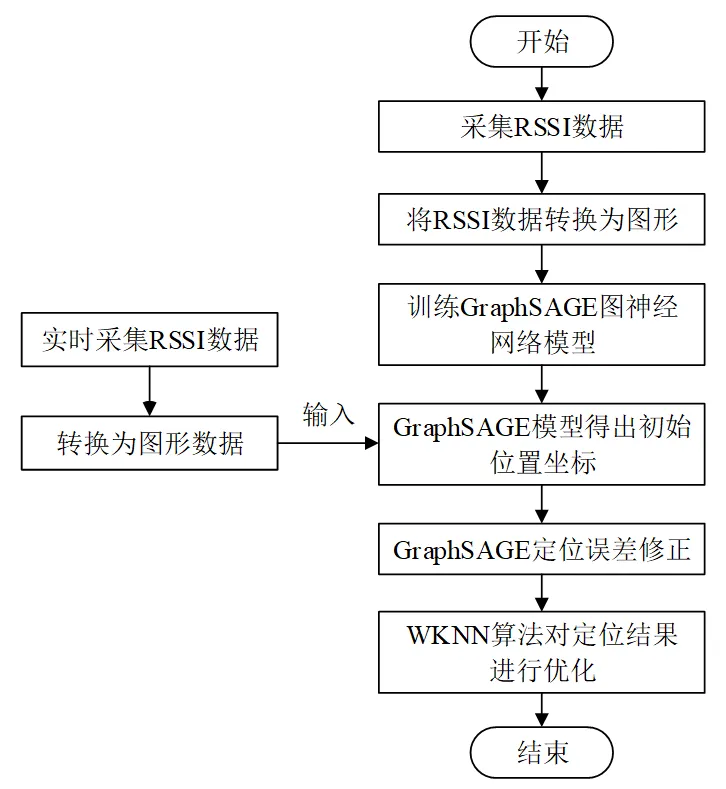
图1 改进的GraphSAGE神经网络定位算法流程
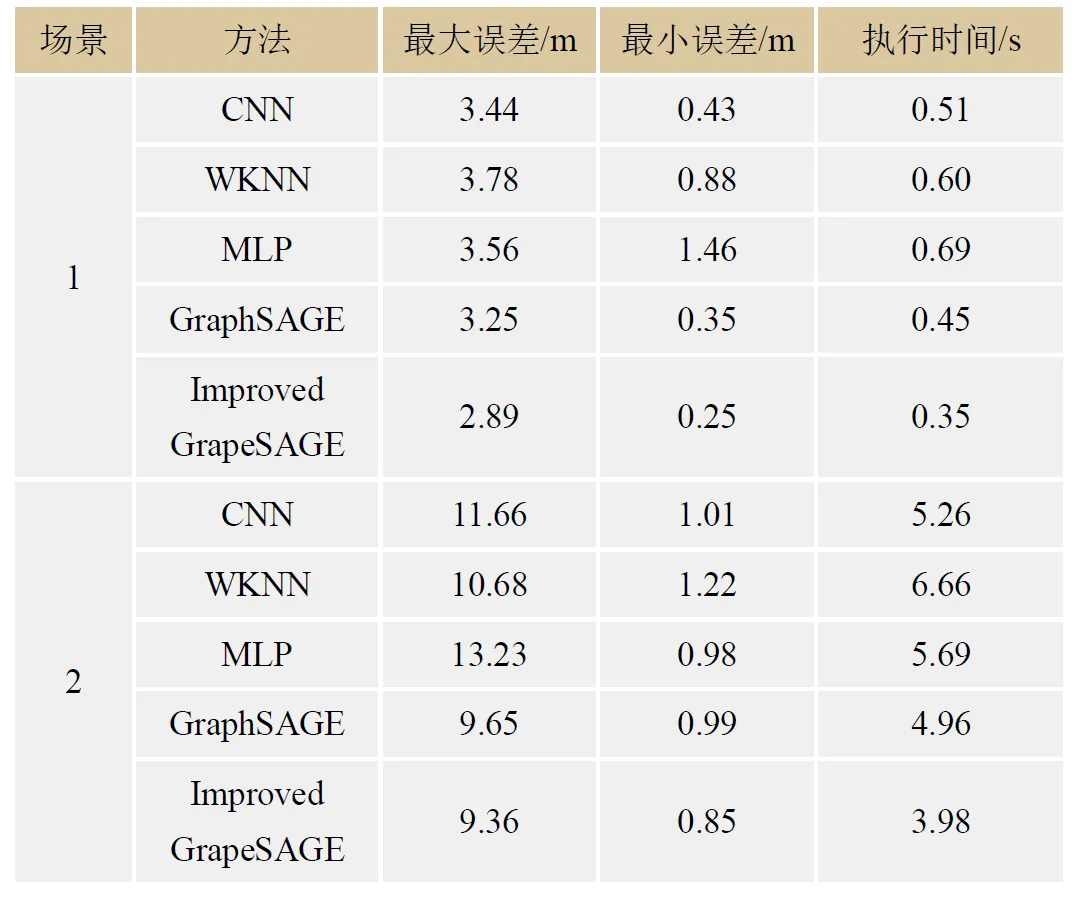
3)为了评估本文定位算法的定位性能,将本文改进的GraphSAGE神经网络定位方法与常用的几种定位方法进行对比实验,结果如表1所示。实验结果证明,提出的改进的GraphSAGE神经网络定位算法有效提高了定位精度,且具有较高的系统稳定性。
表1 不同定位方法性能比较
针对电网智能巡检中MR巡检机器人在室内进行保障性运维工作时,定位定位精度低、稳定性差等问题,提出了一种改进的GraphSAGE神经网络定位算法。在GraphSAGE神经网络考虑利用AP之间以及AP与RP之间的空间关系进行定位的同时,融入WKNN算法利用各个RP之间的相对关系进行定位,以此提升定位精确度。实验结果证明,与传统的定位算法相比,本文提出的改进的GraphSAGE神经网络定位算法具有较高的定位精确度,同时定位结果的波动性较小,系统稳定性较高。改进的GraphSAGE神经网络定位算法能够在图数据上进行端到端的学习,有效捕捉数据之间的复杂关系和依赖关系。因此,利用该算法进行定位时,该算法根据构建的数据可以处理多尺度的特征,有效学习这些数据特征之间的关系,从而提高定位的准确性和系统鲁棒性。在实际应用中,本文所提定位算法除了可以应用到电网巡检场景,还可以应用到地下室内定位与导航、交通车辆定位以及智慧城市等复杂室内场景中。