在自然界中,壁虎凭借脚趾上的分级刚毛与敏锐的触觉感知,能在垂直、倒置甚至粗糙表面上灵活穿梭,即便面对复杂环境也能精准调整附着力,从容应对各类突发状况。这种“感知-响应”的天然优势,长期以来都是仿生机器人领域追求的目标——如何让仿生爬壁机器人摆脱“盲目粘附”的局限,真正拥有“触觉感知”能力?
近日,受壁虎脚趾触觉感知启发,南京航空航天大学吉爱红研究员、王林锋、俞志伟副研究员团队研发出一种新型多模态柔性触觉传感器(MFTS),并将其无缝集成于仿壁虎机器人足部,成功让机器人实现对粘附状态、表面特征、外部载荷等多维度信息的实时感知,为仿生爬壁机器人的智能化升级提供了全新解决方案。相关研究以“Gecko-inspired sensorized foot enables versatile contact-adhesion perception”为题,发表在Chemical Engineering Journal上。
仿生灵感:复刻壁虎脚趾的“感知密码”
壁虎之所以能实现高效粘附与灵活移动,核心在于其脚趾表皮下分布的多种机械感受器——它们如同“天然传感器”,能实时捕捉接触力、表面纹理、脱离动态等关键信息,通过“触摸-感知-驱动”的闭环机制,精准调控附着力。此前,仿生爬壁机器人虽能模仿壁虎的粘附结构,却因缺乏高效的感知系统,难以应对复杂动态环境,适应性和灵活性大打折扣。
针对这一痛点,受壁虎脚趾启发,研究团队设计出集成摩擦电(TrS)、压阻(PrS)和压电(PeS)三种感知机制的MFTS传感器。其中,TrS负责捕捉动态接触-脱离过程,PrS感知准静态力与粘附演化,PeS识别滑动振动与表面粗糙度,三者协同工作,完美复刻了壁虎脚趾的多维度感知能力,让仿壁虎机器人“足端”拥有了媲美生物壁虎的“触觉灵敏度”。
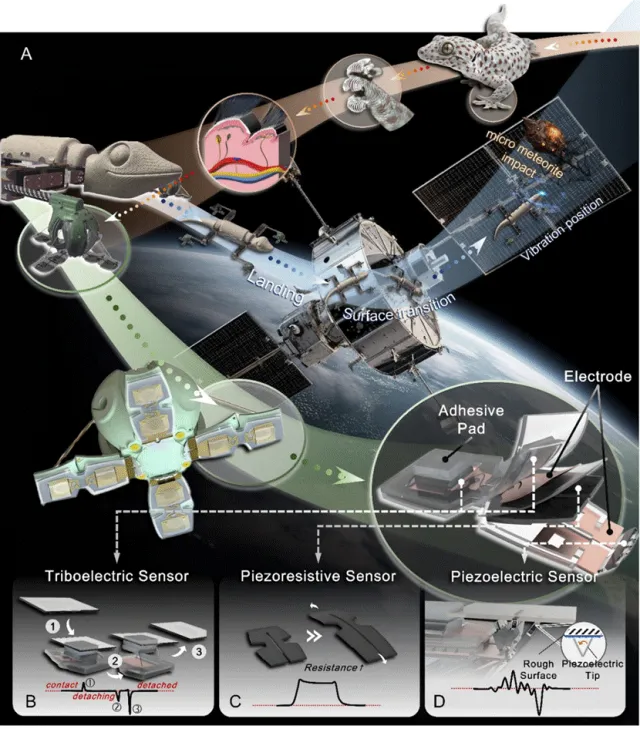
图1 仿壁虎足端MFTS触觉传感器设计、工作原理与应用
核心突破:多模态感知,解锁仿壁虎机器人“感知新技能”
与传统单一功能传感器不同,这款集成于仿壁虎机器人足部的MFTS传感器,实现了“一站式”多信息感知,其核心优势体现在三大维度:
一是精准感知粘附状态:传感器能清晰捕捉机器人脚趾的接触、牵拉、脱离全过程,通过特征信号精准判断粘附是否稳定,甚至能预测当前附着力大小,为机器人调整动作提供实时反馈,避免“脱附坠落”风险。实验显示,传感器对接触力的感知精度极高,能在低接触压力下精准识别粘附状态的细微变化。
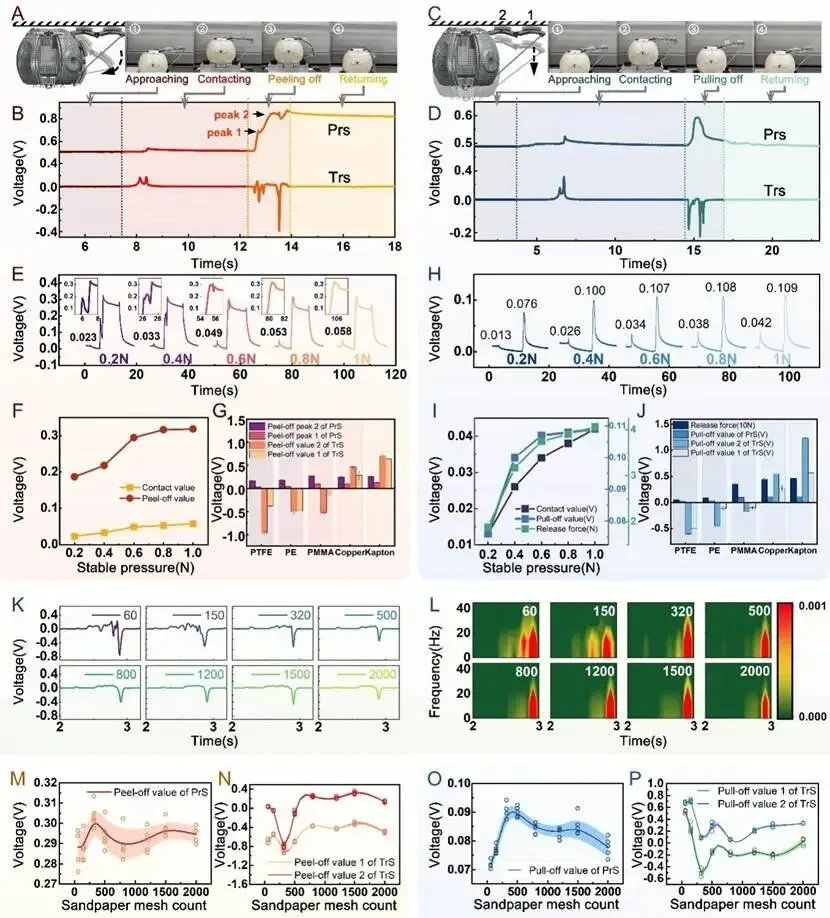
图2 单仿壁虎脚趾上MFTS触觉感知。(A,B,E,F,M)仿壁虎脚趾接触及撕脱(peel-off)过程的状态、接触力、撕脱力感知。(C,D,H,I,O)仿壁虎脚趾接触及拉脱(pull-off)过程的状态、接触力、撕脱力感知。(K,L)对表面粗糙度的感知。
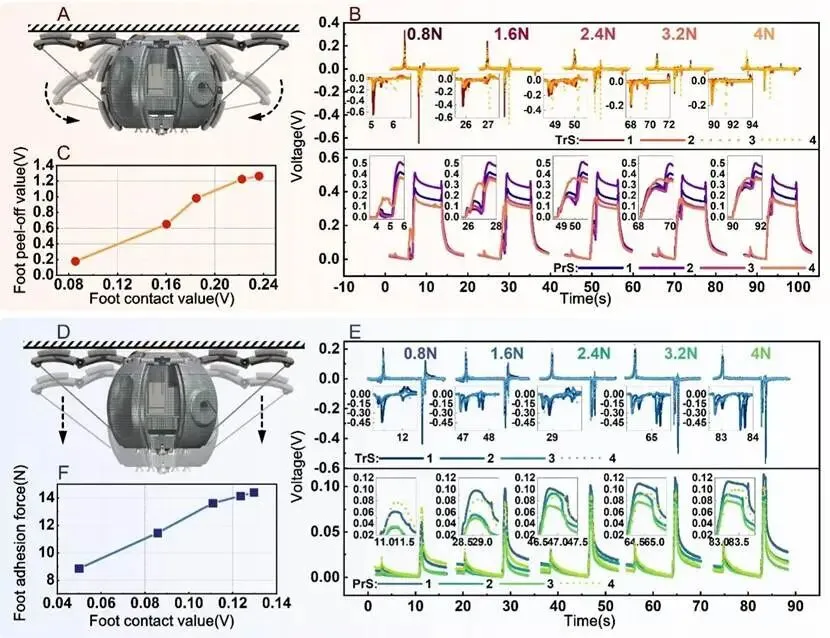
图3 仿壁虎足端对接触粘附状态感知及粘附力的预测
二是智能识别环境特征:无论是不同材质(铝、ITO、PMMA等)的表面,还是不同粗糙度的砂纸,传感器都能通过特征信号差异快速区分;甚至能感知表面凸起、边缘、曲率等复杂结构,以及表面材质的切换,让机器人在非结构化环境中也能灵活适配。
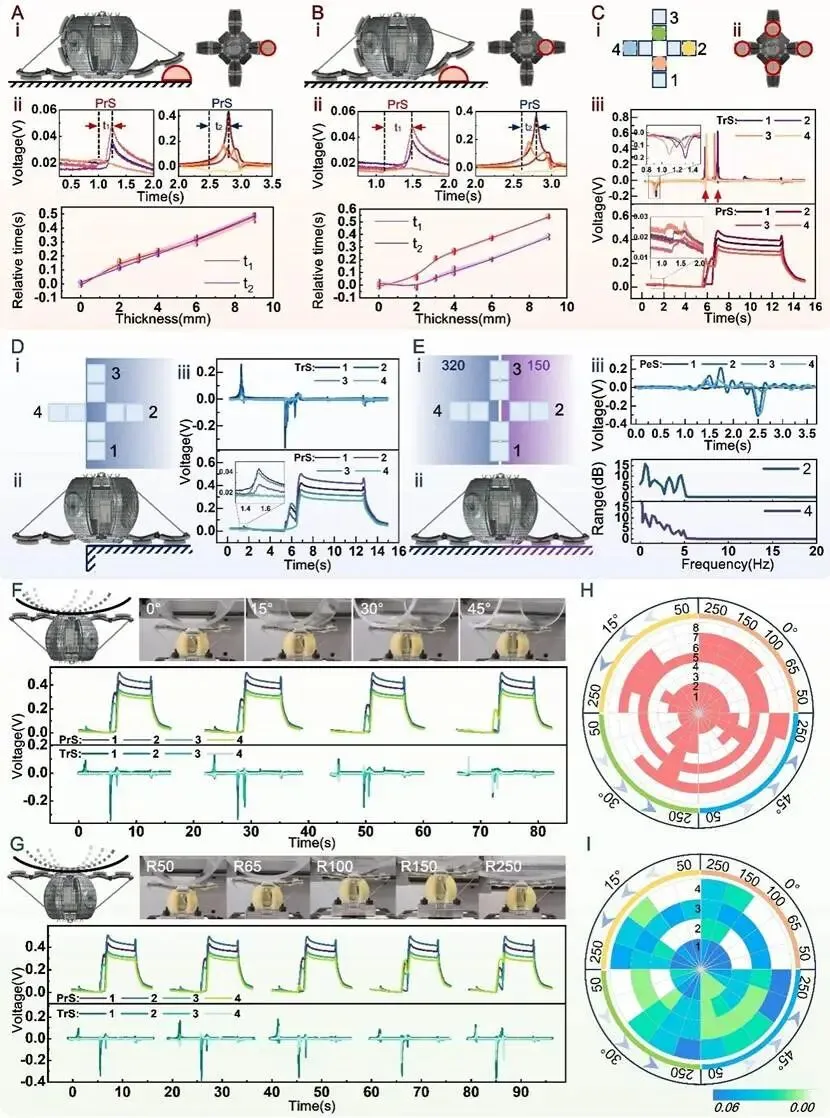
图4 仿壁虎足端MFTS触觉传感器阵列实现多种表面特征感知。(A,B,C)对表面凸起、凸起分布、高度等特征的感知。(D,E)对表面边缘、不同粗糙度表面过渡的感知。(F,G,H,I)对表面曲率及足端与表面接触状态的感知
三是实时响应外部载荷:传感器能精准感知静态切向载荷、瞬时冲击力以及环境振动的频率,不仅能判断载荷的大小与方向,还能通过振动信号诊断接触设备的运行状态,为机器人应对突发干扰、完成复杂任务提供保障。
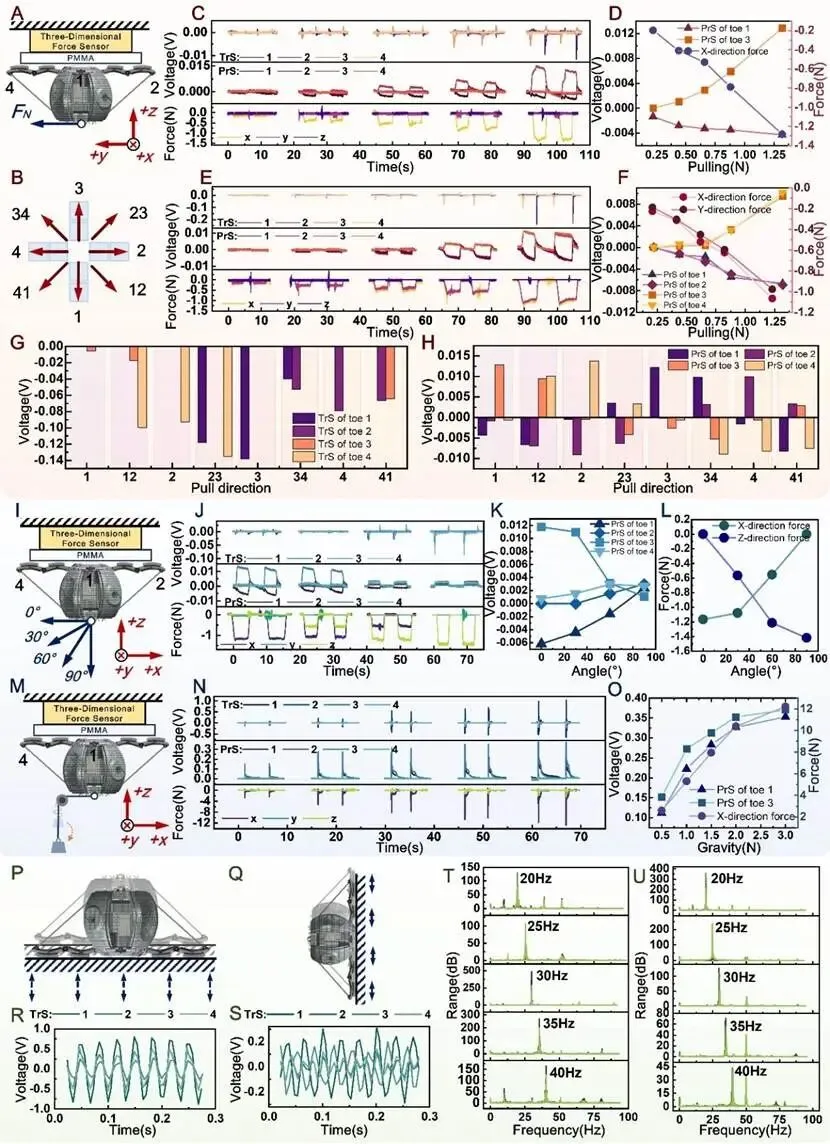
图5 对外部载荷和振动的感知。(A-L)足端对外部静态作用力大小、三维方向的感知。(M-O)足端对外部瞬态冲击力的感知。(P-U)足端对不同方向振动频率的感知。
场景验证:模拟微重力下的“实战表现”
为验证传感器的实战能力,研究团队将其集成于仿壁虎机器人,在模拟微重力下开展了一系列测试,展现出卓越的感知能力:
在机器人行走过程中,传感器能清晰捕捉三角步态的每一个动作,精准区分脚趾的接触、脱离、前进三个阶段,实时监测粘附状态;当机器人未实现有效粘附时,传感器会立即输出微弱信号,可用于提醒机器人调整动作;在表面材质切换(如从ITO到铝表面)时,传感器能通过信号突变精准识别过渡过程,助力机器人平稳适应新环境。更值得关注的是,传感器还能感知微陨石撞击等瞬时冲击,并通过信号强度定位撞击位置,这一特性让该机器人在航空航天领域具备巨大应用潜力——未来可用于空间站、卫星等设备的表面检测与维护,在微重力环境下实现稳定移动与精准作业。
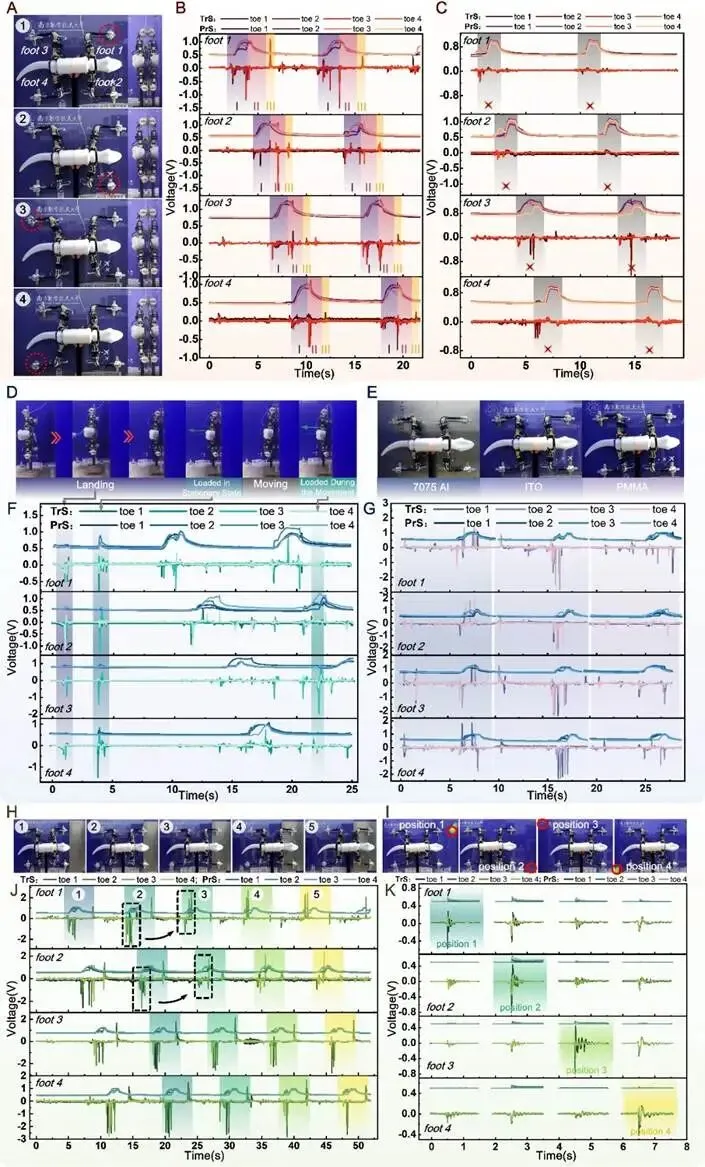
图6 模拟微重力下仿壁虎机器人足端触觉感知验证。(A-C)仿壁虎机器人运动步态、接触、粘附状态感知。(D,F)仿壁虎机器人在表面着陆及受瞬态外力的感知。(E,G,H,J)仿壁虎机器人对不同材质表面及表面过渡的感知。(I,K)仿壁虎机器人对冲击的感知和定位。
综上所述,该研究不仅解决了传统仿生爬壁机器人“感知不足”的核心痛点,更建立了多模态粘附感知的全新框架,为仿生传感器与机器人的集成应用提供了新参考。这款MFTS传感器无缝集成于机器人足部,不牺牲粘附性能的同时,实现了感知功能的全面升级。
研究团队未来将进一步融合人工智能技术,实现传感器数据的高效处理与机器人的自适应控制,推动仿壁虎机器人在航空航天、设备检修、管道维护等领域的产业化应用。此次成果也再次印证了仿生工程的核心价值——向自然学习,让仿生系统拥有更强大的环境适应能力与智能决策能力。


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
