南京理工大学沈煜年团队!Nature Communications | 一种用于飞行机器人壁面附着/停靠行为预测的机器学习框架.让飞行机器人“挂”在墙上
大家好,今天分享的是一篇发表于 Nature Communications 的机器人学重磅论文,题目为 "Machine learning-based framework for wall-perching prediction of flying robot"。本文的作者为南京理工大学的 沈煜年 教授。
摘要
在自然界中,鸟类和昆虫能轻而易举地停歇在垂直的树干或墙壁上。然而,对于人造飞行器而言,在高速撞击下通过微型棘刺(Spines)抓牢墙面是一项极具挑战的动力学任务。传统的数值模拟和实物实验不仅耗时,且难以覆盖海量的结构与控制参数。
本研究开发了一个高效的机器学习预测框架,用于预测带有棘刺的飞行机器人在垂直墙面上的栖息成功率。研究首先通过建立经过验证的物理模型,计算机器人在高速栖息过程中的瞬态动力学;随后,利用混合样本数据训练出数据驱动模型,实现了对栖息事件成功与否的高精度预判。该框架不仅优化了机器人的控制策略和结构参数,更大幅降低了设计成本。
研究背景与内容
让无人机“挂”在墙上休息,可以显著节省电量并扩大监控视野。但墙面栖息涉及高速碰撞、接触力学及复杂的机身翻转过程。如果角度或速度稍有偏差,机器人就会从墙面反弹并坠落。
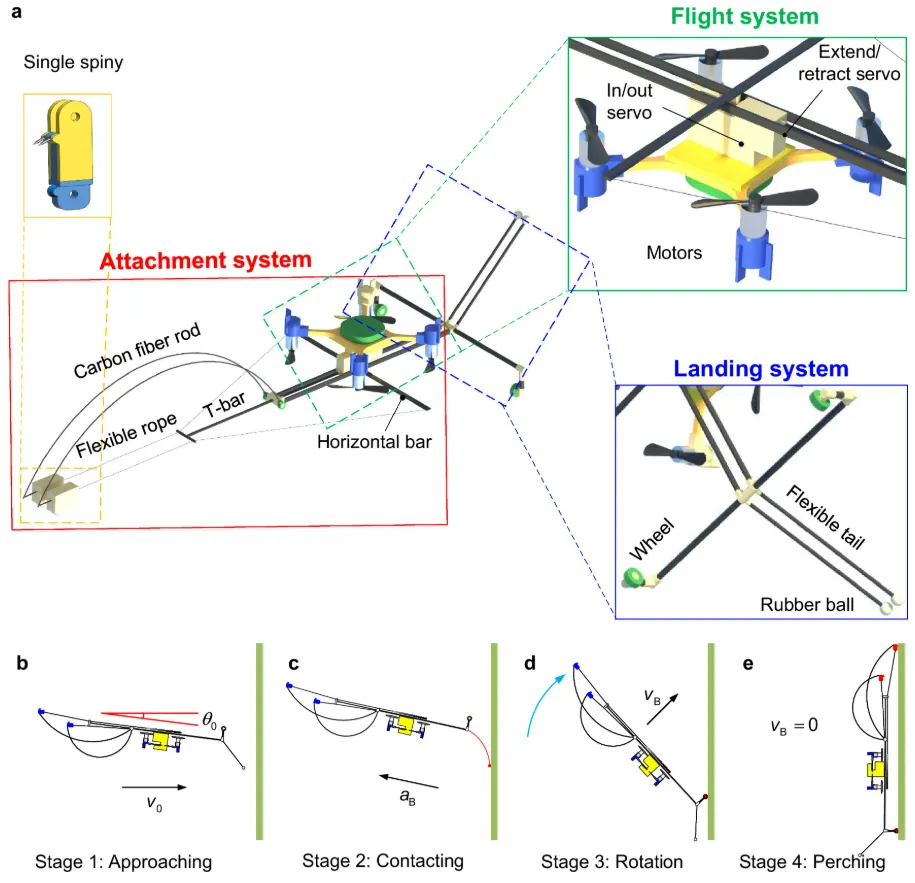
图 1. 飞行机器人在垂直墙面栖息的动态过程。 展示了机器人从接近墙面、接触碰撞到利用足部棘刺挂住墙面的完整物理演化。
核心技术:物理引导与数据驱动的融合
沈煜年教授团队采用了一套“两步走”的技术路线:
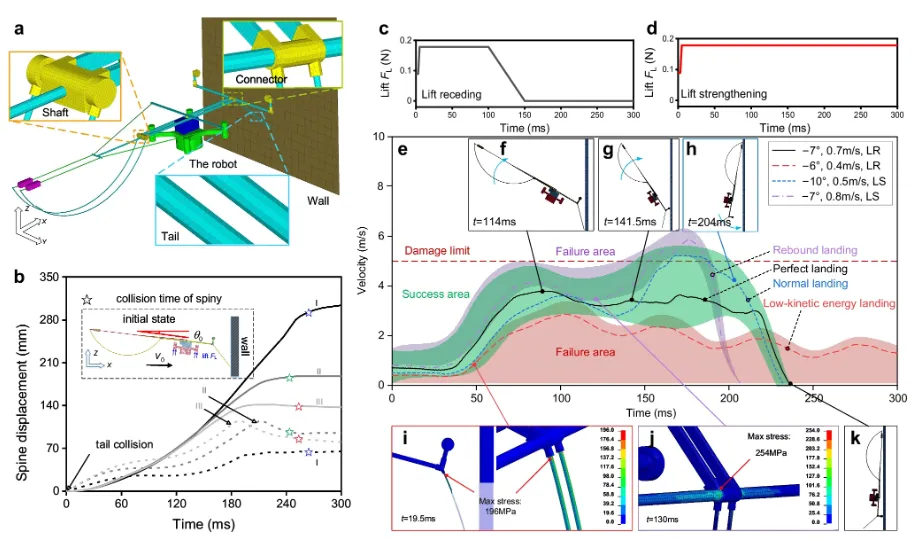
1. 知识建模与瞬态动力学分析研究团队首先建立了一个精密的数学模型,分析机器人与墙面接触那一刻的力学反馈。通过计算棘刺的受力情况和机身的能量耗散,识别出决定栖息成功的关键物理因子。
2. 机器学习分类预测利用物理模型生成的数万组模拟数据,研究人员训练了一个深度学习分类器。这个 AI 就像一位经验丰富的“教练”,只需输入当前的飞行状态和机器人参数,就能瞬间判断这次栖息能否成功。
图 2. 基于机器学习的栖息预测框架。 展示了从物理仿真获取数据、到神经网络训练、再到最终预测输出的闭环技术方案。
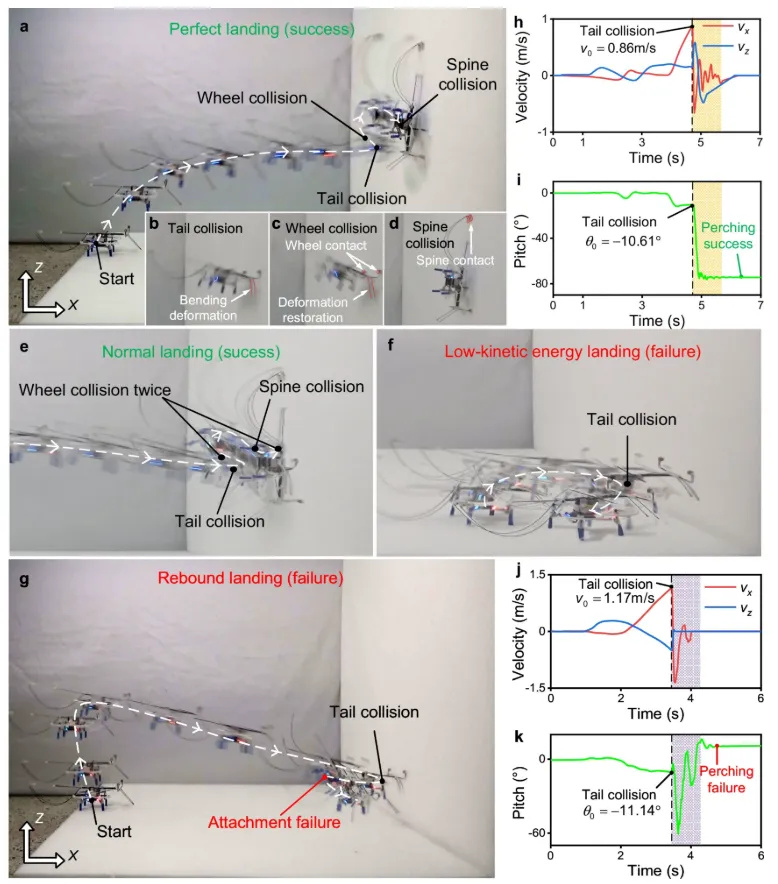
实验验证:从模拟到实战
研究团队通过大量实验验证了该框架的实用性:
高精度预测: 在对任意栖息事件的预测中,机器学习模型的准确率极高,显著优于传统的经验公式。
设计加速: 相比传统方法,该框架在几秒钟内即可完成数千种设计方案的筛选。
稳定性提升: 根据 AI 优化后的控制策略,飞行机器人在多种初速度和角度下均展现出了稳定的垂直栖息能力。
图 3. 栖息成功与失败的参数边界图。 AI 划分出的清晰边界,直观展示了速度与角度的黄金组合区域。
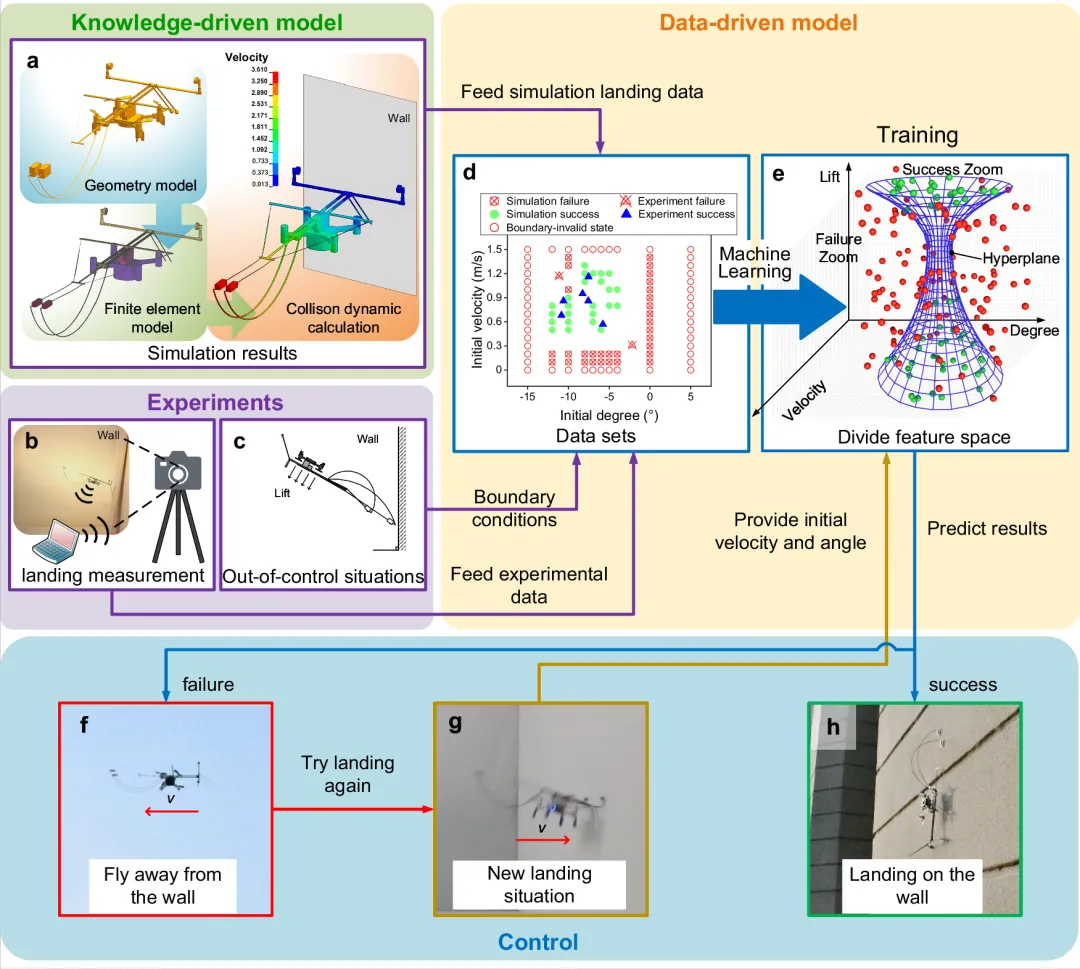
图 4 不同初始条件下的停靠结果分布图
展示了机器人在不同初始俯仰角、初始水平速度组合下的停靠结果分布,用于直观呈现成功 / 失败区域边界。
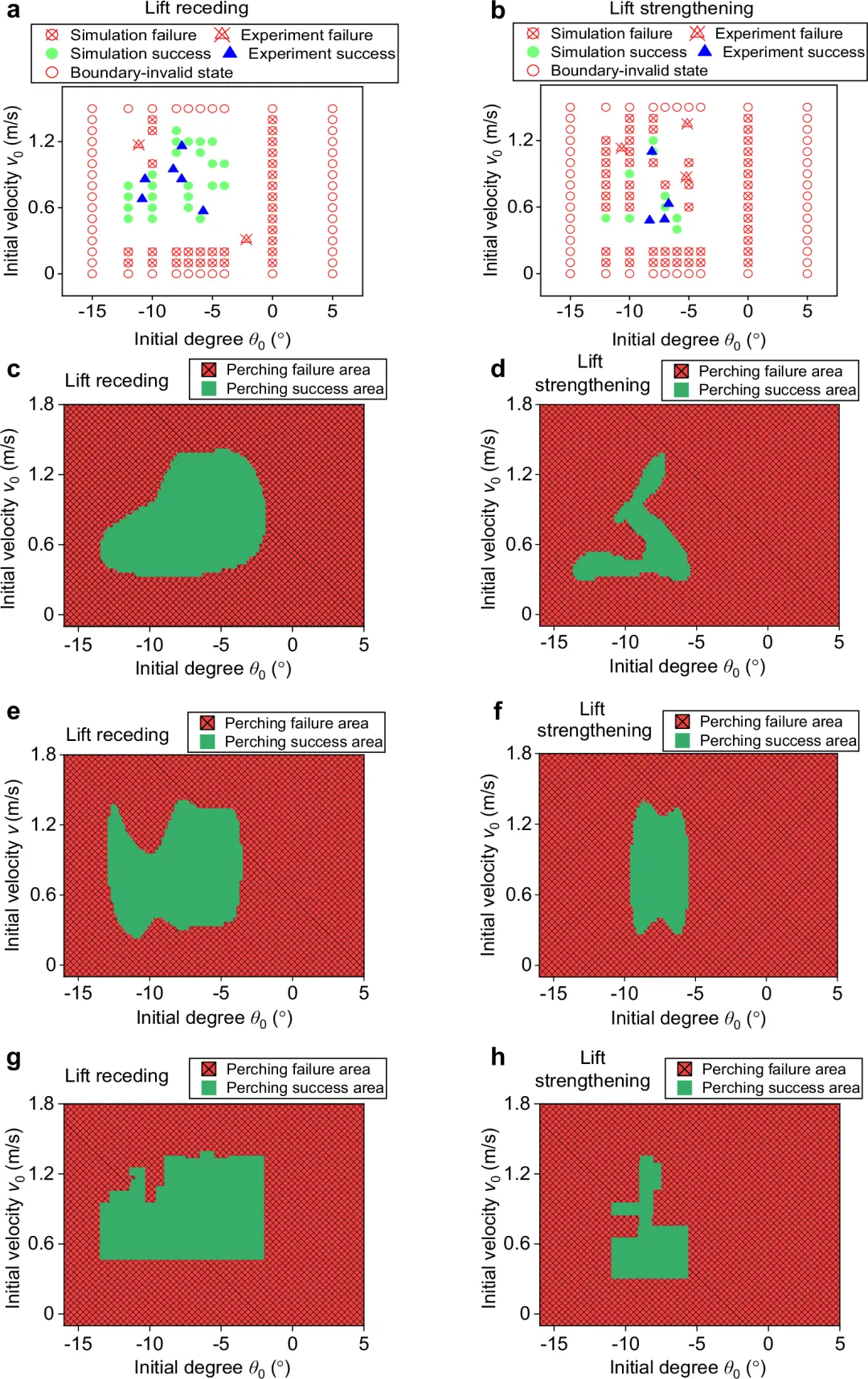
图 5 不同升力模式下的停靠成功率对比图
对比了机器人在三种升力控制模式下的停靠成功率,用于选择最优控制策略。
总结与展望
南京理工大学沈煜年教授团队的研究为飞行机器人的功能扩展提供了重要支撑:未来的无人机将不再局限于空中俯瞰,它们可以随时“驻足”墙面,像生物一样灵活地适应复杂的人造环境。
本文的创新点总结如下:
效率革命: 将复杂的碰撞动力学问题简化为高效的分类预测问题。
物理启发: 机器学习建立在坚实的知识建模基础之上,而非盲目的黑盒。
闭环设计: 实现了从预测到优化的完整流程,直接服务于新型机器人的开发。