【Science Advances】南京大学提出“类皮肤”传感内计算架构,实现触觉信号的大规模并行处理与数据压缩
- 2026-05-17 17:12:01
Nature Communications | 研究进展:南京大学团队提出了一种大规模并行“传感内计算”架构。该研究通过将 32×32 柔性电容式压力传感器阵列与忆阻器交叉阵列相连接,并利用频分复用(FDM)技术,在完全的模拟域内实现了触觉信号的单次并行读取与处理。
文章地址:https://www.nature.com/articles/s41467-026-71697-1
文章投稿添加:GreenRobotics | 欢迎投稿
全文速览
在智能机器人和可穿戴技术中,实时感知和处理海量触觉信息是核心挑战。传统的触觉传感架构中,传感器和处理器在物理上是分离的,触觉数据以串行方式读取,随后经过模数转换送入数字处理器。这种“感算分离”的模式会导致巨大的能量消耗和严重的延迟。受人类皮肤中梅克尔细胞(既能感知轻微触摸,又能对边缘和纹理等空间特征进行编码)的启发,研究团队提出了一种大规模并行的传感内“类皮肤”计算(Skinomorphic computing)方案。该方案利用连续时间模拟信号的频分复用(FDM)技术,将 32×32 柔性电容压力传感器阵列与 1T1R(一晶体管一忆阻器)交叉阵列结合。实验证明,该系统能够并行感知并“原位”修复残缺的“NJU”压力图案;更重要的是,通过级联两个忆阻器阵列,系统能够在前端传感器内直接提取复杂压力图案的纹理特征(空间频率),实现触觉信息的大幅压缩,为未来开发具备高吞吐量触觉感知能力的智能皮肤开辟了新途径。
01 仿生灵感与传感内并行计算原理
人类皮肤中的梅克尔触觉盘(由梅克尔细胞与传入神经末梢形成)不仅负责感知,还能在信息传递给神经元之前,将机械压力编码为生物电信号。神经元随后以大规模并行的方式处理这些信息。
受此机制启发,团队提出了一种基于柔性电容阵列的连续时间模拟计算架构。
计算机制 (矩阵乘法): 当压力模式作用于电容阵列时,各节点的电容变化量形成了一个物理矩阵 。利用频分复用(FDM)技术,将包含多种频率成分的连续时间正弦电压信号(代表权重矩阵 )同时输入到阵列的各行。 物理定律求解: 根据电容定律()和基尔霍夫电流定律,从阵列列端输出的积分电流即可表示为两个矩阵的乘积:。 架构优势: 传统的 N×N 像素阵列串行读取需要逐个扫描,或者需要 个端口单独布线;而该方案通过共用的行列线,仅需 2N 个端口即可在单次操作(One-shot)中完成全阵列的并行读取与处理,极大降低了布线复杂度和延迟。
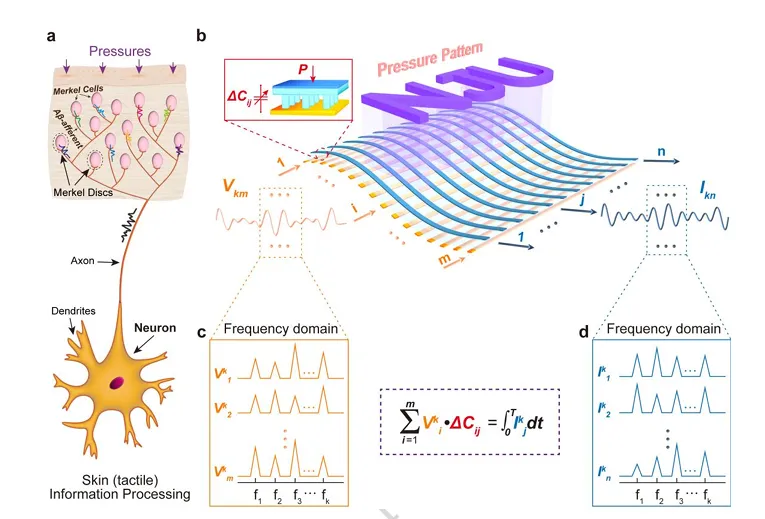
图1. 大规模并行传感内“类皮肤”计算架构。
(a) 受梅克尔盘启发的触觉感知与处理生物学机制。(b) 基于柔性电容传感器阵列的传感内并行计算示意图。压力改变了对应节点的电容大小。(c-d) 阵列中实施频分复用(FDM)方案。输入端(c)是包含多种频率分量的电压信号矩阵 ,输出端(d)是积分电流的频谱表示 。这一过程在物理层面上直接完成了矩阵-矩阵乘法(MMM)。
02 柔性电容式压力传感器阵列设计与表征
为了实现硬件部署,团队制造了一个 32×32 的柔性电容式压力传感器阵列,具备宽响应范围、高均匀性和极佳的耐用性。
器件结构: 采用典型的三明治结构。底层为聚酰亚胺(PI)基底与金(Au)电极带;中间介电层为带有微柱阵列结构的聚二甲基硅氧烷(PDMS);顶层为柔性导电聚合物 PEDOT:PSS 电极与 PI 封装层。 微观结构: PDMS 介电层表面布满了宽 10 μm、高 30 μm、周期为 30 μm 的微柱。这种结构设计有效提升了器件对压力的灵敏度。 性能测试: 传感器在 0.155 kPa 到 32.875 kPa 范围内表现出良好的响应;阵列中 1024 个器件的电容响应率()均值为 19.31%,标准差仅为 2.38%,展现出高度的一致性;在 4000 秒的连续循环加载测试中,器件未出现性能衰减,证明了其出色的长期稳定性。
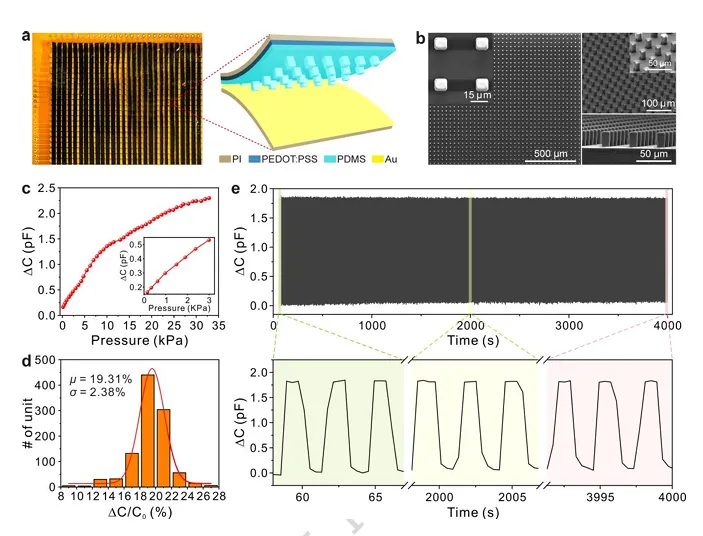
图2. 柔性电容式压力传感器阵列。
(a) 传感器阵列的光学照片及三维结构示意图。(b) 具有微柱结构的PDMS介电层的俯视与截面扫描电子显微镜(SEM)图像。(c) 单个传感器的电容变化与压力的响应曲线,插图显示低压区具有良好的线性度。(d) 32×32 阵列中1024个器件的电容响应率均匀性统计直方图。(e) 传感器在 5 kHz、2 V 偏置下,长达 4000 秒的疲劳耐久性测试曲线。
03 硬件集成与图案的原位修复
为了在硬件层面验证计算能力,研究人员将 32×32 的柔性传感器阵列与一个 32×32 的 1T1R(一晶体管一忆阻器)交叉阵列进行了电学连接。
并行感知 (Identity Matrix): 当通过编程将忆阻器阵列的电导状态配置为“单位矩阵”时,系统执行纯读取模式。实验中,将 3D 打印的“NJU”(南京大学缩写)印章压在传感器上,系统能够精准、单次地在频域输出完整的“NJU”图案。 并行修复 (Restoration Matrix): 该架构超越了单纯的感知。当输入一个“残缺”的“NJU”压力图案时,研究人员将特定的修复权重矩阵烧录进忆阻器阵列中。在物理读取的瞬间,硬件直接完成了受损图案的复原计算,输出了完整的“NJU”图案。这意味着信号处理在模拟前端(传感器内)就已经完成。
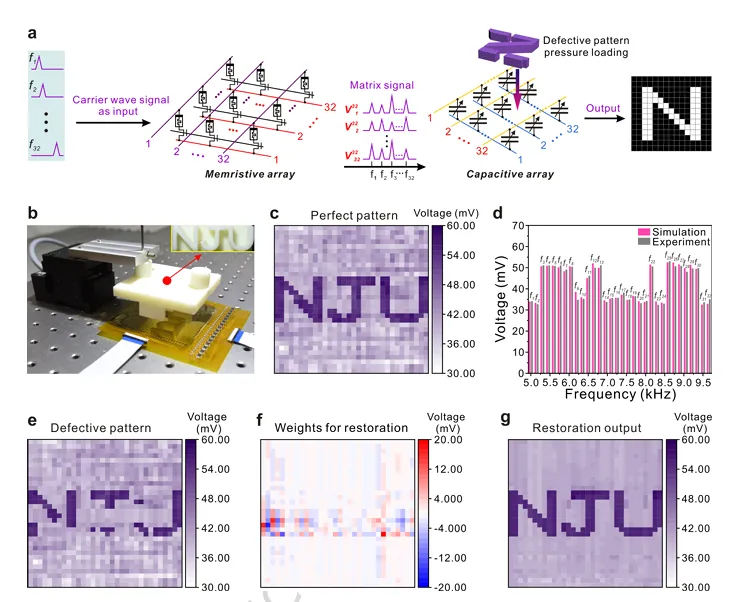
图3. 基于柔性传感器阵列的传感内计算硬件实现。
(a) 32×32电容阵列与32×32忆阻器阵列级联,实现图案读取与处理的示意图。(b) 自动压力加载装置实物图,插图为3D打印的“NJU”字样印章。(c-d) 完美“NJU”图案的读取结果,以及实验测量频域电压与仿真结果的高度一致性对比。(e) 加载在阵列上的残缺“NJU”图案。(f) 烧录进忆阻器阵列用于图像修复的权重矩阵。(g) 经过前端硬件直接处理后,输出的已修复完成的“NJU”图案。
04 复杂图案的特征提取与数据压缩
除了简单的图案修复,团队进一步挑战了更高级的任务:在传感器内部直接执行二维离散傅里叶变换(2D-DFT),提取复杂压力分布的纹理特征(空间频率)。
数学转换: 2D-DFT 本质上是三个矩阵的乘法 。通过数学展开,其核心实部计算可以表示为 。 硬件执行: 团队利用传感器阵列和两个 1T1R 忆阻器阵列,分别将转换矩阵 和 烧录到忆阻器中。系统在模拟域直接输出了图案的空间频率特征。 数据压缩效果: 对于周期性图案(如网格、条纹),输出的特征表现为频域上的离散点;对于非周期图案(如方形块),表现为准连续的频域图。这种频域特征图相比于原始的像素数据,极度稀疏(数据量大大减小)。 机器学习验证: 团队构建了包含 5 种类别(圆、网格、方块、条纹、三角形)的数据集。将压缩后的频域特征数据输入一个简单的两层神经网络进行训练,结果表明,基于频域信息的识别准确率与使用完整原始图像的准确率几乎持平。这证明了该架构在实现大幅数据压缩的同时,完美保留了用于模式识别的关键特征。
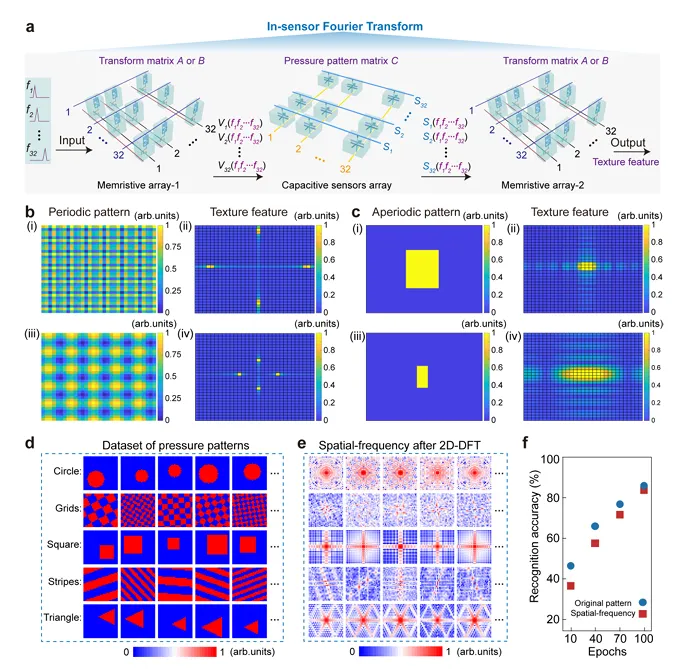
图4. 复杂压力图案的并行纹理特征提取。
(a) 结合电容阵列与两个忆阻器阵列执行三矩阵乘法(2D-DFT)的硬件实现示意图。(b) 两种不同空间周期的周期性图案(i, iii)及其提取出的二维频域特征(ii, iv)。(c) 两种不同尺寸的非周期性图案(i, iii)及其提取出的频域特征(ii, iv)。特征图呈现高度稀疏性,实现了数据压缩。(d) 包含五类图案的压力数据集原始图像。(e) 经过 2D-DFT 转换后的对应频域特征数据集。(f) 神经网络使用原始图像(蓝点)与压缩后的空间频域特征(红方块)进行训练与测试的准确率对比,两者表现高度一致。
05 结论与展望
本研究提出并实验验证了全模拟域的大规模并行“传感内类皮肤计算”架构。系统通过频分复用技术,在前端柔性电容传感器内部实现了对压力模式的单次感知、智能修复以及复杂纹理特征提取。
这种方案彻底颠覆了传统的串行读取模式,将原本巨大的数据量在传感器端就进行了有效的计算和压缩。由于该架构规避了传统像素级阵列复杂的独立布线问题,并极大降低了后端数字芯片的计算负担,它为未来开发低功耗、低延迟、高吞吐量的具身智能机器人皮肤和智能可穿戴设备提供了一条极具前景的技术路线。
往期精彩文章
【Nature Sustainability】从“电子垃圾”到“植物养料”:Nature子刊展示百万次寿命的全可降解软体机器人手指
【Science Advances】仿生水獭“锁气御寒”:UCLA团队开发气盾保暖策略,使水下光热机器人做功骤升282倍!
版权声明
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 紫金花开!他们把南京故事讲给世界听~
- 年薪35万+!南京育英外国语学校全学科教师招聘!
- 谁说南京面条不能“打”,南京本土面条首登米其林必比登推介,34年老店“无名老卤面”入选
- 来看看南京的家族办公室
- 南京银行“悦养健康”之健康检测系列活动开始啦!
- 告别苏宁与恒大!南京河西元通商圈,400米超高层地标将易主,起拍价19.68亿元!谁来接?
- 南京南附近一楼带大院子 鱼池 大露台
- “苏超”南京至宿迁往返直通车10日开启购票通道
- 温差14℃!小雨!中雨!南京接下来天气...
- 【五一◆北京】南京出发北京高铁5日游,五一假期只要2790元/人,真纯玩,无购物无自费,打卡北京旅游必去景点,现报名立减200元/人!
