欢迎投稿交流,投稿请联系:Sykeji02(微信号)针对直升机主动后缘襟翼旋翼(active rotor with trailing-edge flaps, TEFs)在减振控制中对控制算法鲁棒性、实时性与适应性的高要求,本文引入广义预测控制(GPC)策略,并完成了从悬臂梁仿真、台架试验到主动旋翼风洞试验的逐级验证。作者首先基于 CARIMA 预测模型建立 GPC 控制器,并利用频率扫频获得悬臂梁传递函数,对控制器在典型单频扰动下的抑振效果进行初步验证;随后在台架试验中确认其对柔性梁系统的快速抑振能力;最终将 GPC 算法部署到一副三桨、带后缘襟翼的主动旋翼上,以旋翼桨毂垂向力作为反馈信号,在不同飞行状态下开展风洞减振测试。实验结果表明,GPC 控制器能够在悬停及前飞条件下有效抑制 1/rev 与 3/rev 振动,并在无需像传统 CTHHC 那样频繁做相位扫频识别的情况下保持良好的控制效果。论文信息
Gu X, Zhou J, Dong L, Yang W. Generalized predictive control for vibration reduction of an active rotor with trailing-edge flaps. Smart Materials and Structures, 2026, in press.
作者单位
National Key Laboratory of Helicopter Aeromechanics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;College of General Aviation and Flight, Nanjing University of Aeronautics and Astronautics, Changzhou 213300, China.
DOI:https://doi.org/10.1088/1361-665X/ae7685
一句话导读
这篇工作不是单纯讨论“襟翼能不能减振”,而是进一步把广义预测控制真正部署到主动旋翼系统中,证明了该类控制方法在复杂飞行工况下具备可实施性和实际减振价值。
01 研究背景:主动后缘襟翼旋翼为
研究背景:主动后缘襟翼旋翼为什么还需要新的控制算法?直升机振动主要来源于旋翼系统在前飞中的非定常气动环境,例如桨涡干扰、桨身干扰、退行桨失速以及前行桨压缩效应等。这些激励会传递到机体与载荷平台,造成舒适性下降、结构疲劳加剧以及机载设备可靠性变差。
过去的主动减振研究已经证明:在旋翼叶片后缘布置可控襟翼,可以通过附加气动力直接或间接改变桨叶载荷分布,从而削弱振动载荷。相较于高次谐波控制和独立桨距控制,主动后缘襟翼方案具有功耗更低、飞行安全性更好等优势。
但问题并不只在执行机构上。对于主动旋翼系统而言,最终减振效果很大程度上由控制算法决定。经典的连续时间高次谐波控制(CTHHC)虽然在这一领域使用广泛,但它对模型辨识质量、控制增益和相位特性较为敏感,且在不同飞行状态下往往需要重新辨识,这会显著增加试验复杂度。
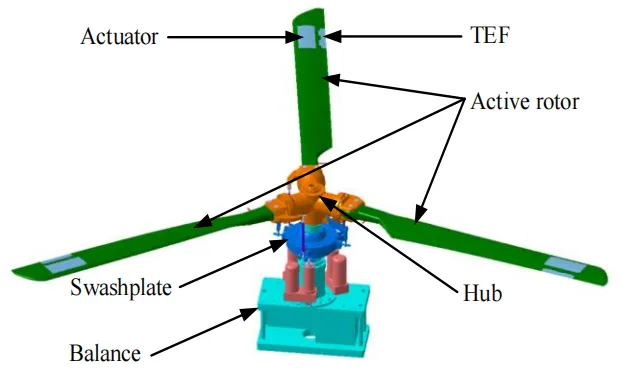
图1. 论文中采用的三桨主动后缘襟翼旋翼模型。每片桨叶均布置后缘襟翼与压电驱动单元,用于通过动态偏转改变气动载荷分布。
本文将广义预测控制(GPC)首次用于主动后缘襟翼旋翼的减振控制。GPC 的核心在于:利用 CARIMA 预测模型描述系统输入输出关系,结合滚动优化与反馈校正,在每一个采样时刻预测未来输出并给出当前最优控制增量。
与依赖固定传递函数和高精度相位匹配的控制策略相比,GPC 更强调在线辨识和模型自适应能力。作者使用遗忘因子递推最小二乘方法实时估计模型参数,然后通过预测时域内的性能指标函数求得控制输入,从而让控制器对系统状态变化保持较好的适应性。
从工程实现角度看,这意味着控制器不必像经典 CTHHC 那样针对不同谐波频率进行大量相位扫频与参数重整,而是通过一次模型辨识和持续更新,实现对目标振动分量的有效压制。
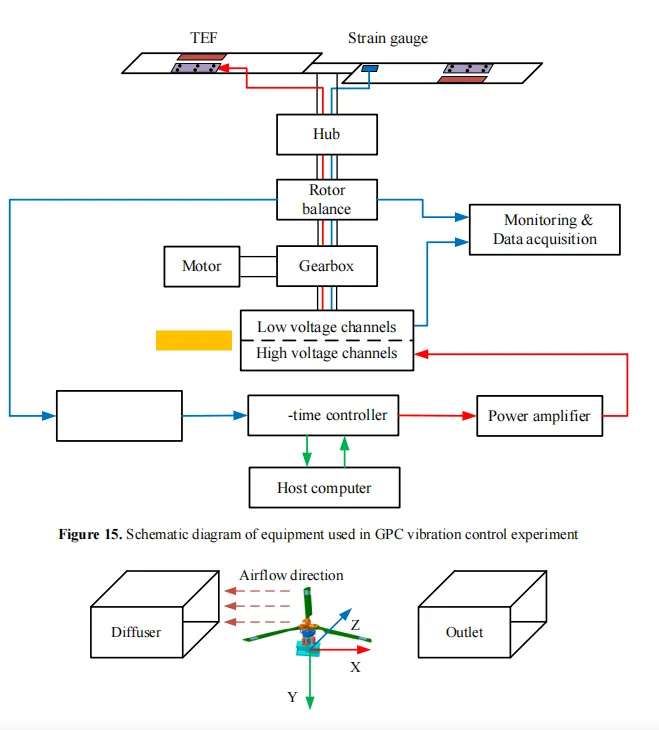
图2. 主动旋翼 GPC 风洞试验控制架构示意。图中展示了从襟翼、应变测量、旋翼天平到功率放大和实时控制器的完整闭环链路。
为了避免一开始就把算法直接放到旋翼风洞试验中,作者先在悬臂梁系统上完成控制器验证。具体做法是对悬臂梁进行频率扫频,获得其传递函数,再在这个可辨识的柔性系统上验证 GPC 控制器对单频扰动的抑制能力。
根据论文结果,悬臂梁系统的辨识传递函数拟合度达到 91.3%,在仿真中,当向系统施加 9 Hz 正弦扰动后,控制器开启后扰动几乎瞬间降至接近零;进一步在台架试验中,悬臂梁振动幅值降低了 92.7%,说明 GPC 控制器具备较强的快速抑振能力。
这种“先简化对象、再上真实系统”的验证路线很有意义。它并不只是增加了一段前置试验,而是给主动旋翼控制算法的工程落地提供了更可靠的过渡环节。
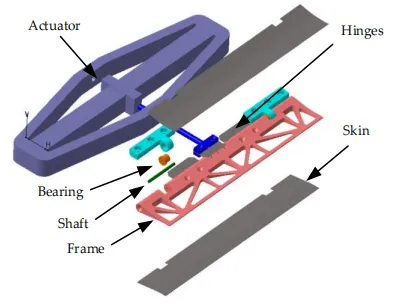
在执行机构设计上,作者为每片桨叶配置了一套菱形框架压电驱动器,用于驱动后缘襟翼动态偏转。该驱动器尺寸为 155 mm × 55 mm × 10 mm,通过内部压电叠堆输出位移,再经菱形放大机构放大后推动襟翼。
风洞测试前,作者还测量了后缘襟翼的静态偏转特性。实验表明,在非旋转条件下,襟翼静偏转角可达到 ±3.5°。这意味着该驱动系统已经具备较明确的控制幅值基础,能够为后续振动抑制提供足够的控制权。
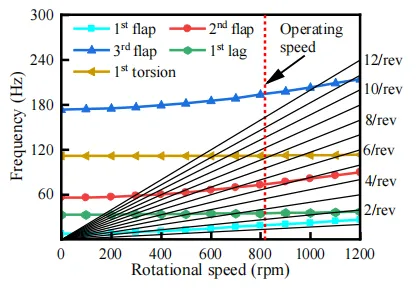
与此同时,作者基于 Hamilton 原理建立了主动旋翼动力学方程,并给出风扇图分析。结果显示,在 816 r/min 的工作转速下,当频率低于 8/rev(108.8 Hz)时,该主动旋翼不存在共振点,从动力学上为后续减振试验提供了可接受的工作条件。
图3. 后缘襟翼驱动系统结构示意。驱动器通过菱形框架放大压电叠堆位移,再经连杆把位移传递给后缘襟翼。
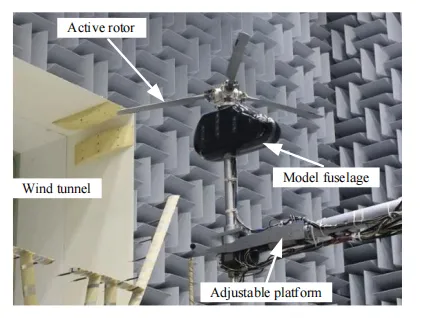
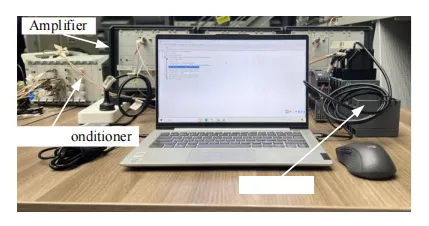
图4. 主动旋翼风洞试验中的关键验证对象,包括动力学风扇图、风洞中的旋翼模型以及数据采集与控制设备。
真正决定这篇论文价值的,是 GPC 控制器在真实主动旋翼风洞试验中的表现。作者选取旋翼桨毂垂向力作为反馈信号,在悬停和前飞(前进比 μ = 0.15)两种工况下,分别考察 3/rev 和 1/rev 振动的控制效果。
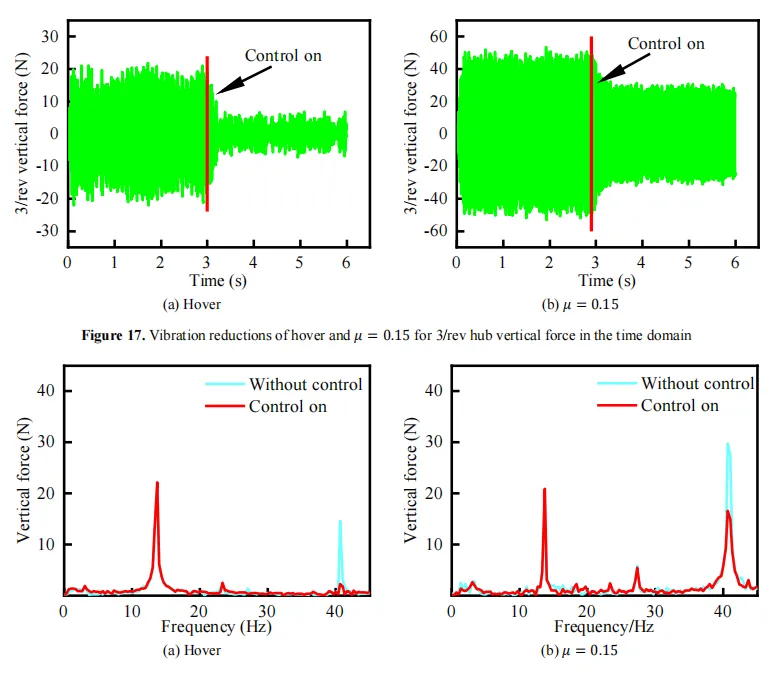
对于 3/rev 垂向振动,控制器开启后,在悬停条件下的减振幅度达到 84.1%,在 μ = 0.15 的前飞工况下仍达到 45.6%。并且论文明确指出,3/rev 分量被抑制的同时,没有观察到其他频率振动被明显放大,这一点对旋翼系统非常关键。
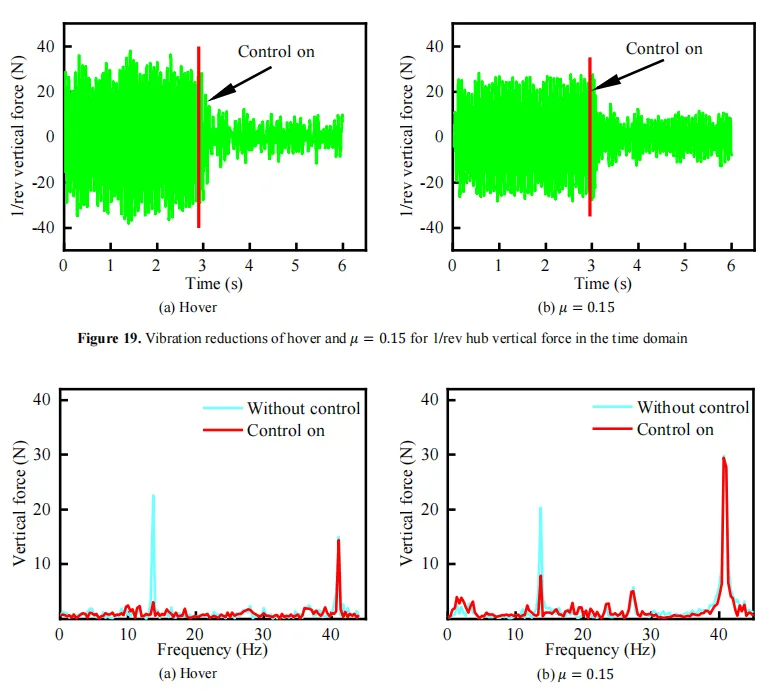
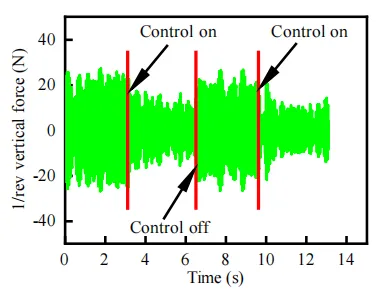
对于 1/rev 垂向振动,GPC 控制器同样表现出较好的通用性:在不改变系统硬件与总体流程的情况下,悬停与前飞工况下的减振幅度分别达到 86.2% 和 61.1%。这说明该方法不仅对某一特定谐波频率有效,而是具有一定的频率适应能力。
图5. 3/rev 垂向振动在悬停与前飞工况下的时域和频域减振结果。控制开启后,目标频率分量明显下降。
图6. 1/rev 垂向振动在悬停与前飞工况下的时域和频域减振结果,以及与传统 CTHHC 控制结果的对比。
论文并没有停留在“GPC 能减振”这一层,而是进一步将其与主动旋翼领域中常用的 CTHHC 方法做了对比。在 μ = 0.15 的前飞条件下,CTHHC 对 1/rev 垂向振动的减幅约为 40%,而 GPC 在同条件下达到 61.1%。作者还指出,CTHHC 对 3/rev 的控制表现明显更弱,甚至接近失效。
更重要的是,GPC 的识别和控制链路更简洁。对于不同谐波频率,经典 CTHHC 往往需要做额外的相位扫频分析,而本文的 GPC 在一次模型辨识后即可对不同谐波实施控制,这直接减少了试验配置和参数调节成本。
从直升机主动减振研究的角度看,这种改进并非单纯是控制器名称的替换,而是将主动旋翼从“能减振”进一步推进到“更容易在复杂工况下持续使用”。
这篇工作的核心亮点在于,它把广义预测控制真正推进到了主动后缘襟翼旋翼的风洞实验层面,而不是停留在仿真验证。文章通过悬臂梁—台架—主动旋翼的逐级验证路线,完整证明了 GPC 在柔性结构减振和主动旋翼振动控制中的可行性。
在性能上,论文给出了较清晰的实验指标:悬臂梁台架减振幅度 92.7%;主动旋翼 3/rev 垂向振动在悬停和前飞工况下分别降低 84.1% 和 45.6%;1/rev 振动分别降低 86.2% 和 61.1%。同时,没有观察到其他频率分量被明显放大,这为其工程应用提供了较强支撑。
在方法层面,GPC 相比传统 CTHHC 更强调在线辨识与滚动优化,对主动旋翼这类状态变化明显、工况切换频繁的系统更具吸引力。对于后续进一步开展多频控制、更大控制权执行机构设计以及飞行试验研究,这篇文章都提供了有价值的参考。
论文信息Gu X, Zhou J, Dong L, Yang W. Generalized predictive control for vibration reduction of an active rotor with trailing-edge flaps. Smart Materials and Structures, 2026, in press.作者单位National Key Laboratory of Helicopter Aeromechanics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;College of General Aviation and Flight, Nanjing University of Aeronautics and Astronautics, Changzhou 213300, China.DOI:https://doi.org/10.1088/1361-665X/ae7685



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
